It was night outside long before the business was over, and nothing was to be seen but the dim eyes and the claws.
Herbert Wells. The Invisible Man. 1897.
Herbert Wells est allé trois fois en Russie. Pendant sa deuxième visite — à ce temps là il y avait déjà l’Union Soviétique — il rencontra Yakov Perelman Isidorovich, qui soumit à l’attention de l’auteur de “L’homme invisible” le fait suivant: si un homme est complètement invisible, aussi les cristallins de ses yeux sont invisibles, et donc ne réfractent la lumière et ne donne pas l’image sur la rétine. Pour cet homme, tout est invisible!
Mais y a–y–il des corps invisibles, quoique inanimés? En 2009, les mathématiciens ont démontré qu’il existe des êtres invisibles inanimés!
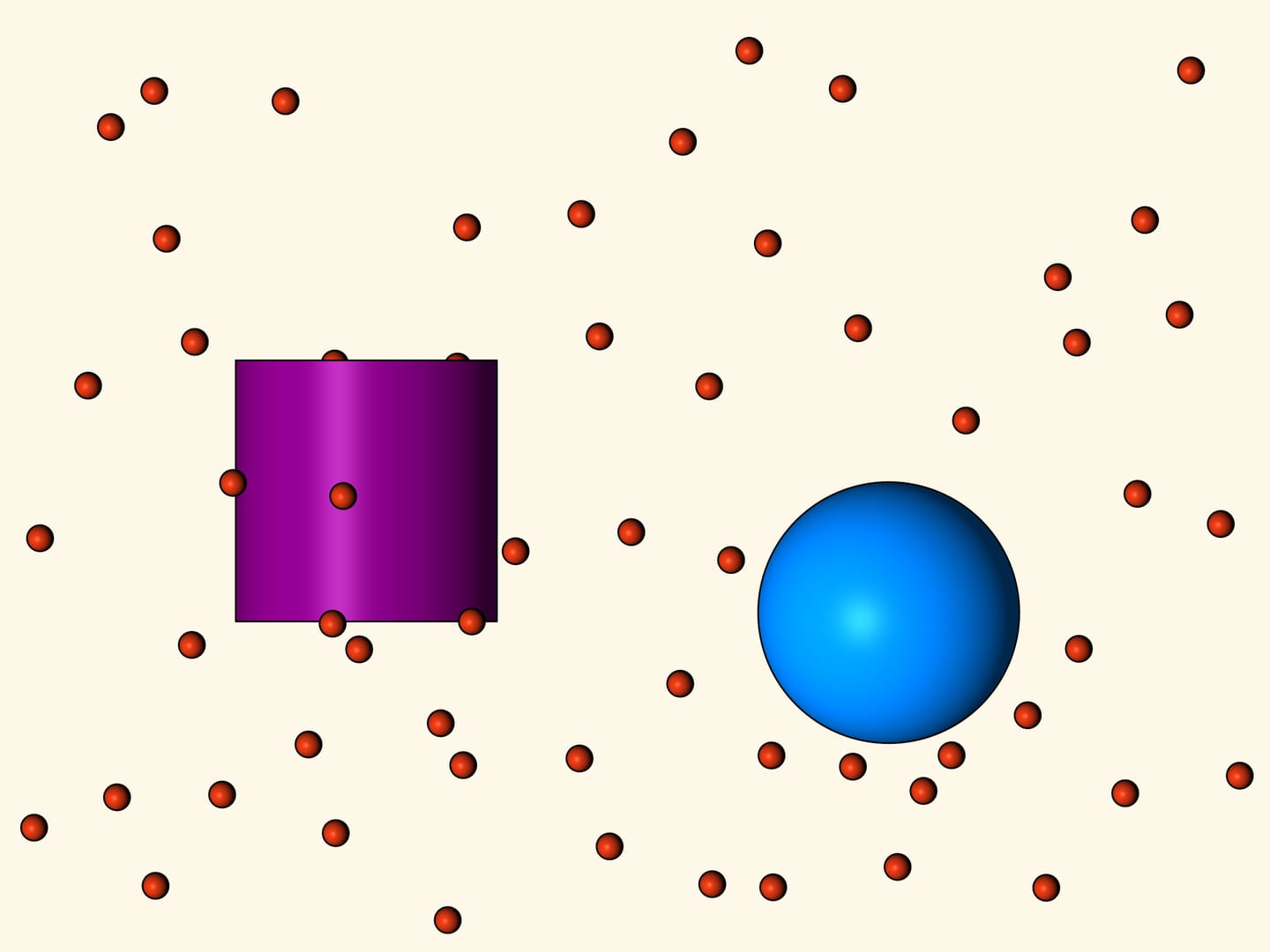
Mais commençons par le XVIIe siècle. Dans «Les principes mathématiques de la philosophie naturelle» («Philosophiae Naturalis Principia Mathematica») Isaac Newton a étudié le problème de la chute (ou mouvement) de corps différents dans un milieu «raréfié, constitué de particules identiques, arbitrairement placé à la même distance les unes des autres» qui rebondissent élastiquement lorsqu’elles entrent en collision avec le corps. Plus tard, ce problème a été appelé «problème aérodynamique de Newton».
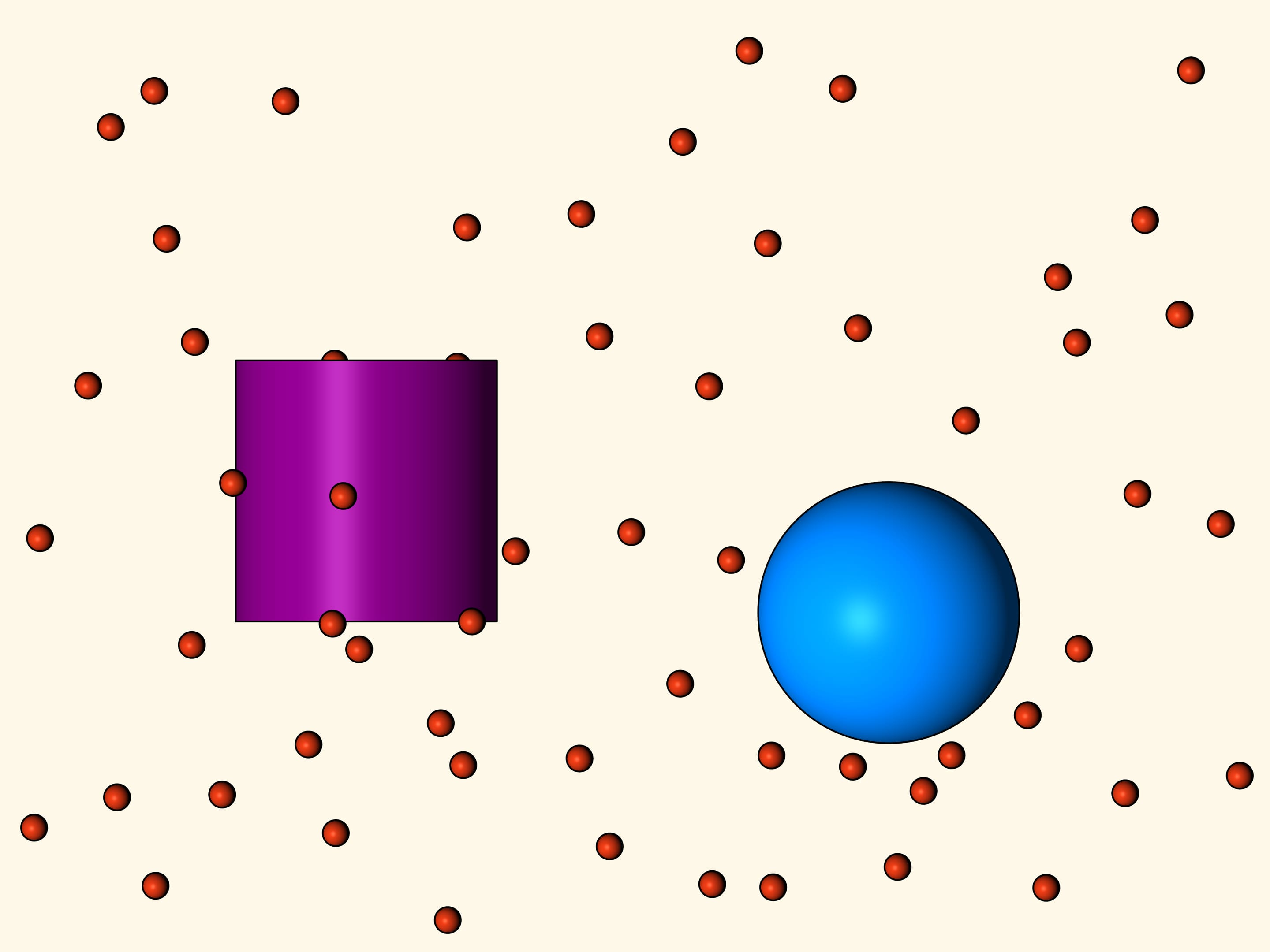
Les deux premiers corps considérés sont une sphère et un cylindre, avec le même diamètre. Lequel de ces corps rencontre moins de résistance? Newton montre par des méthodes géométriques que la résistance pour la sphère sera deux fois plus faible.
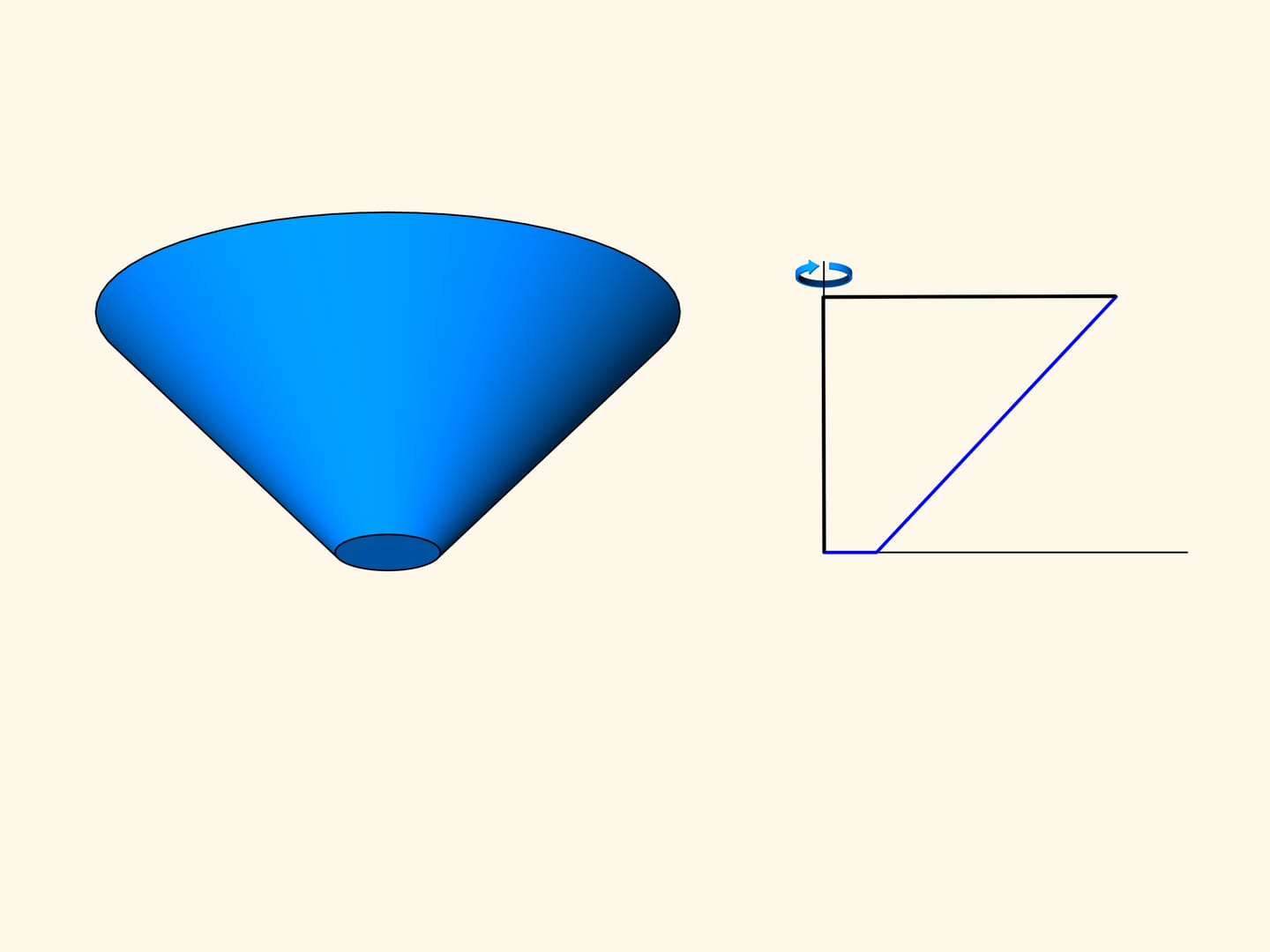
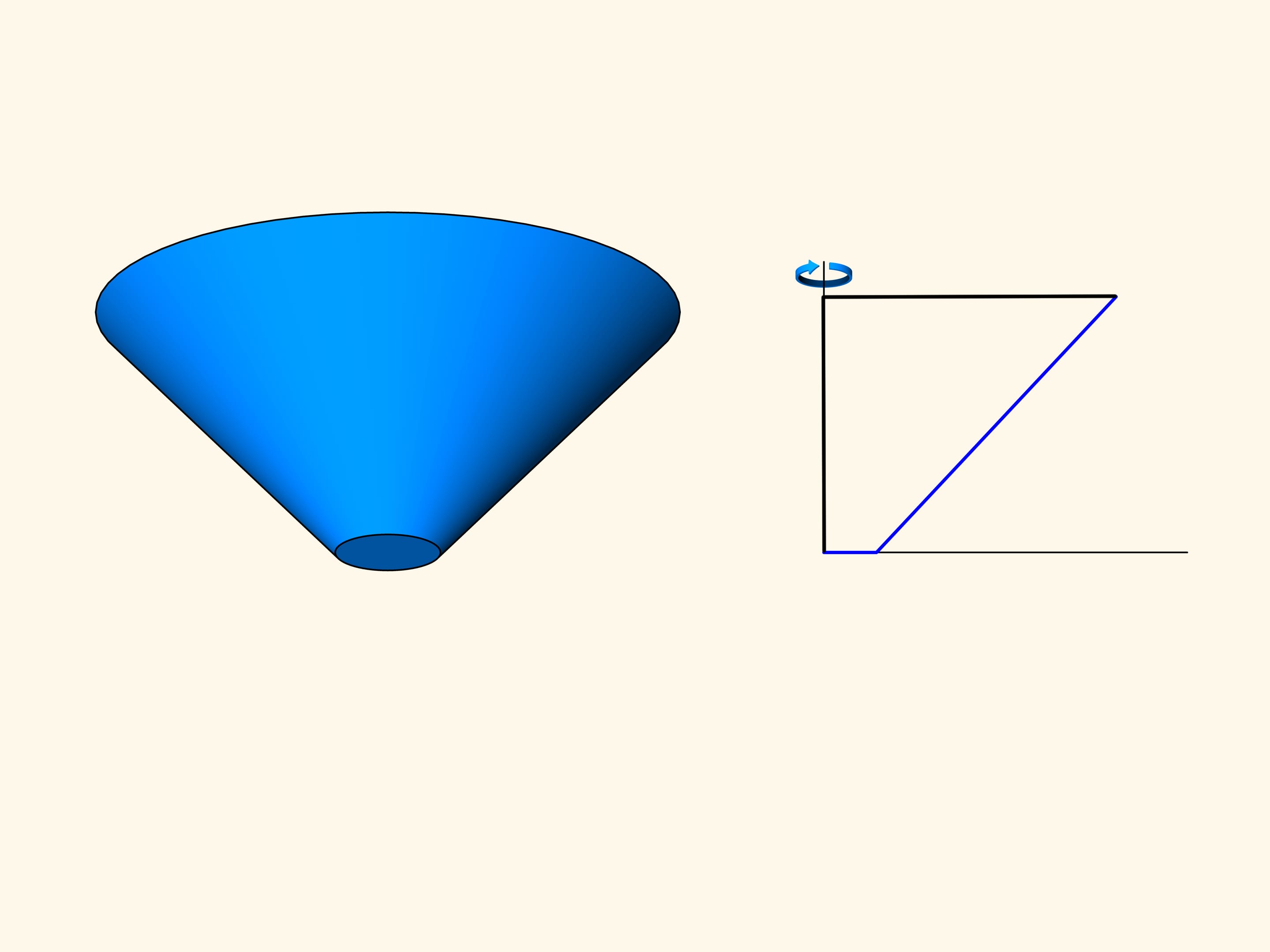
Ensuite Newton commence à étudier les cônes tronqués. Parmi tous les cônes tronqués avec le rayon de la base et la hauteur fixés, trouver celui pour lequel la résistance dans un milieu raréfié — pour un mouvement le long de l’axe du cône — est minime.
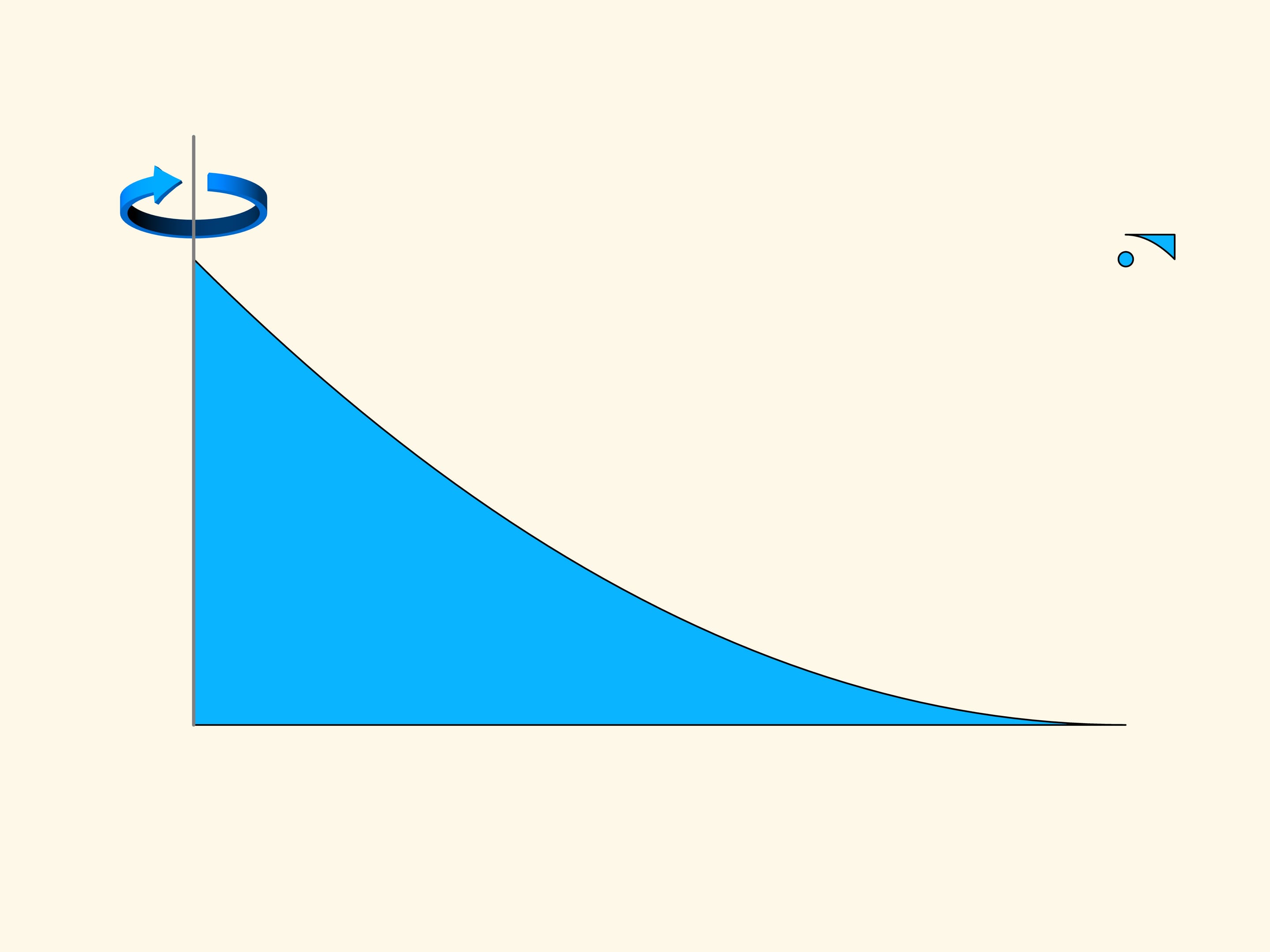
Considérons une section du tronc de cône et le problème dans le cas planaire.
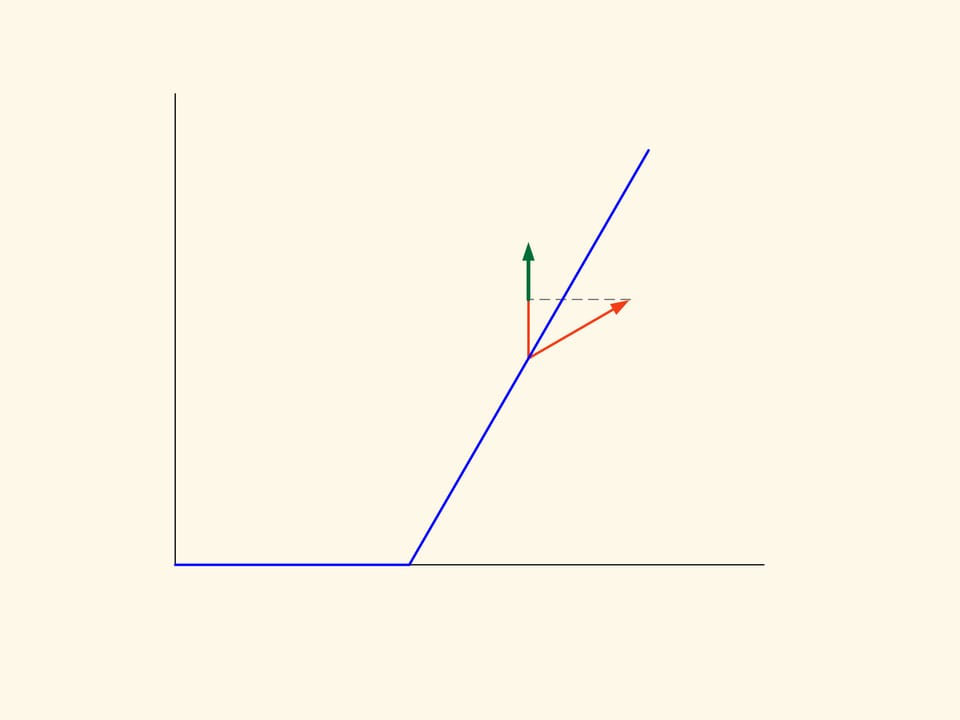
Qu’est ce que c’est la résistance? Lorsque le cône tombe, il entre en collision avec les sphères — les particules du milieu raréfié. Une partie des sphères heurte contre la surface inférieure du tronc de cône, et une partie avec la surface latérale, les autres bougent sans s’arrêter et sans souffrir de l’effet du corps. Quand une particule entre en collision avec le tronc de cône, modifie sa direction de mouvement conformément à la loi que «l’angle d’incidence est égal à l’angle de réflexion». La résistance que la sphère exerce contre la chute du tronc de cône est le changement de la composante verticale du vecteur impulsion de la sphère. Puisque les particules heurtent uniformément en moyenne sur la surface du corps, les poussées vers gauche et vers droite se compensent mutuellement et ne doivent pas être considérés.
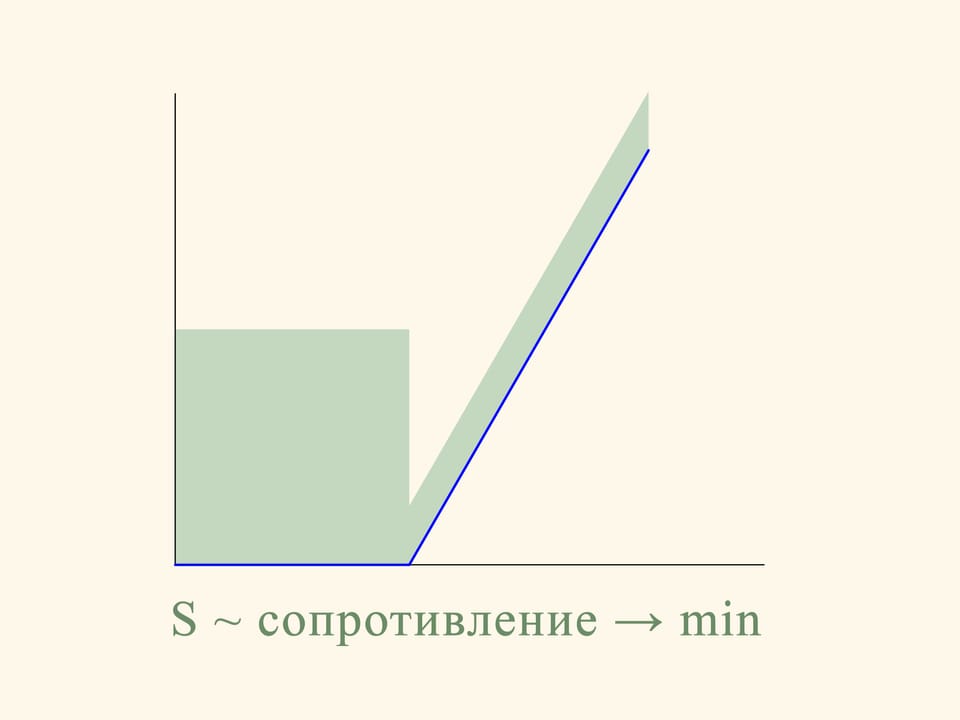
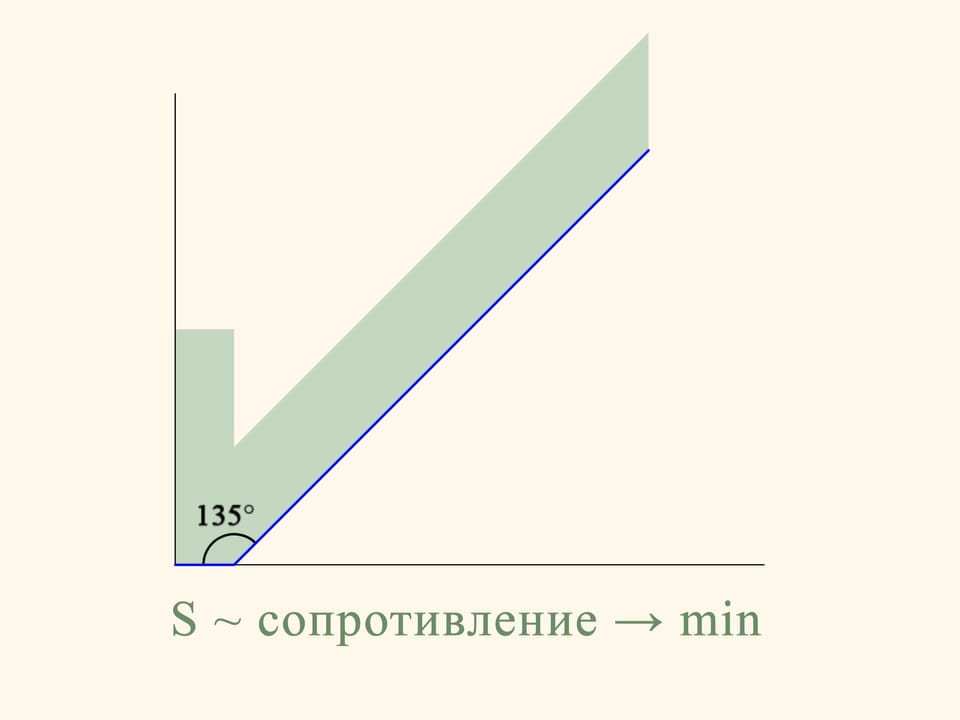
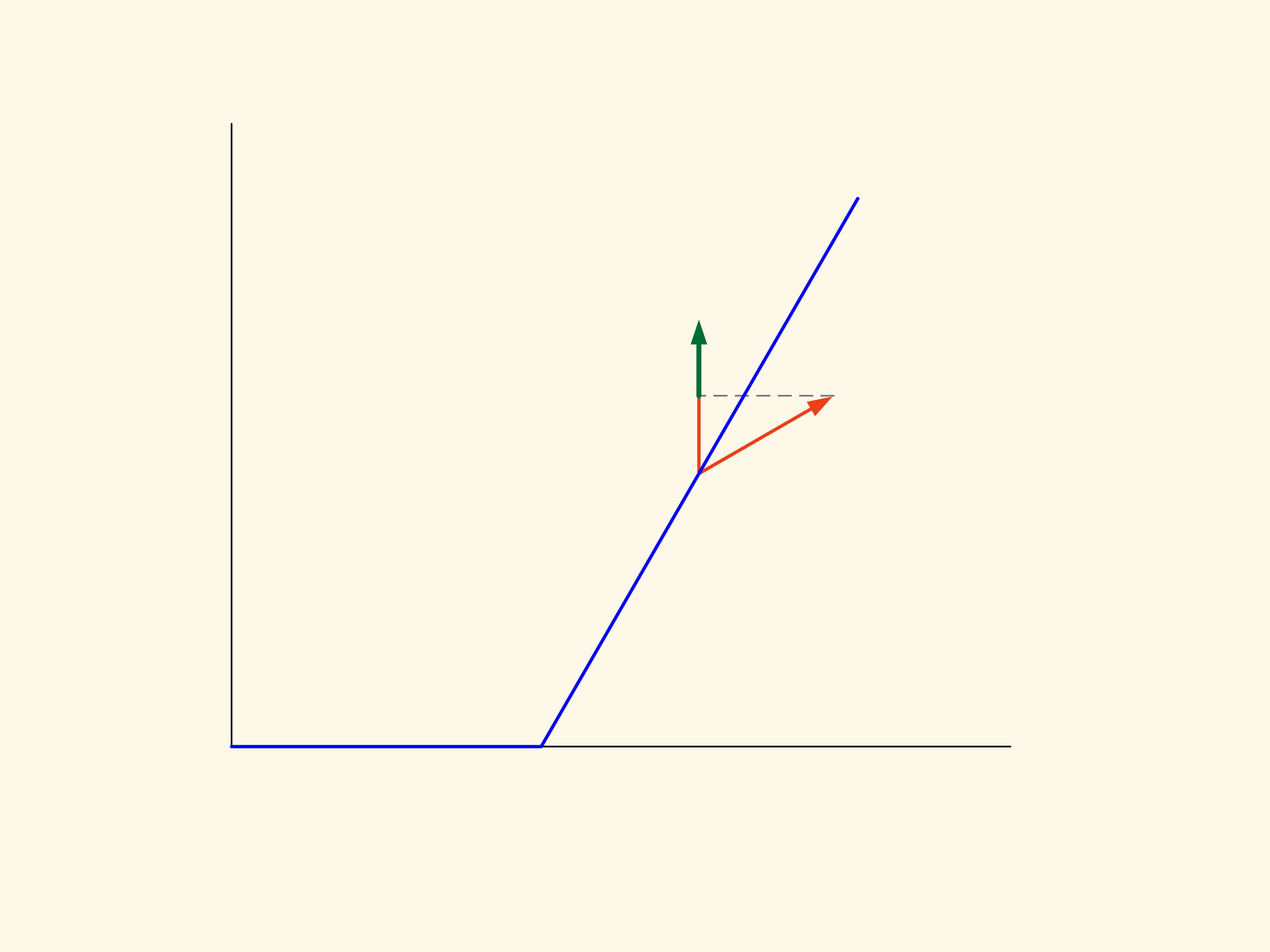
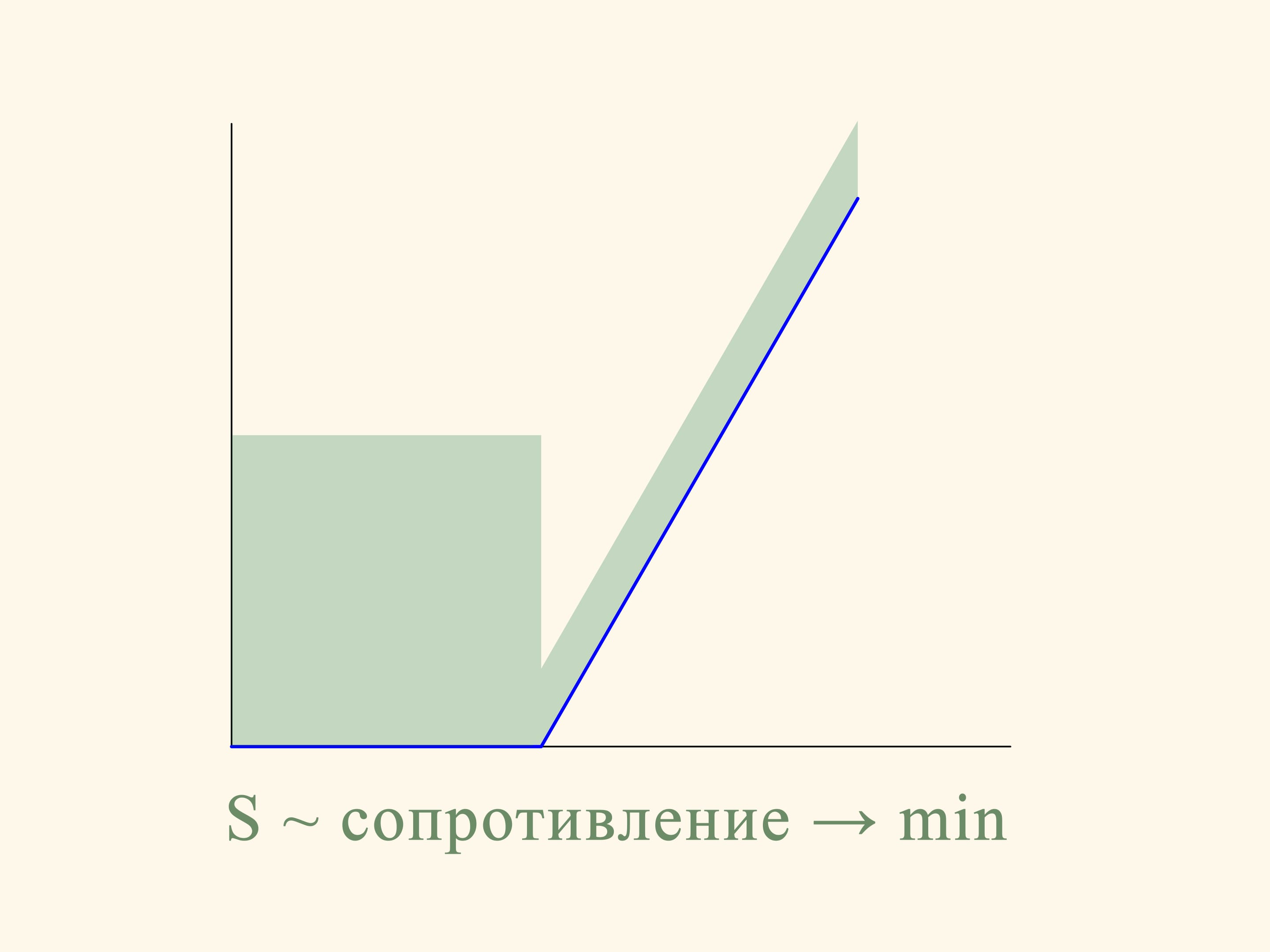
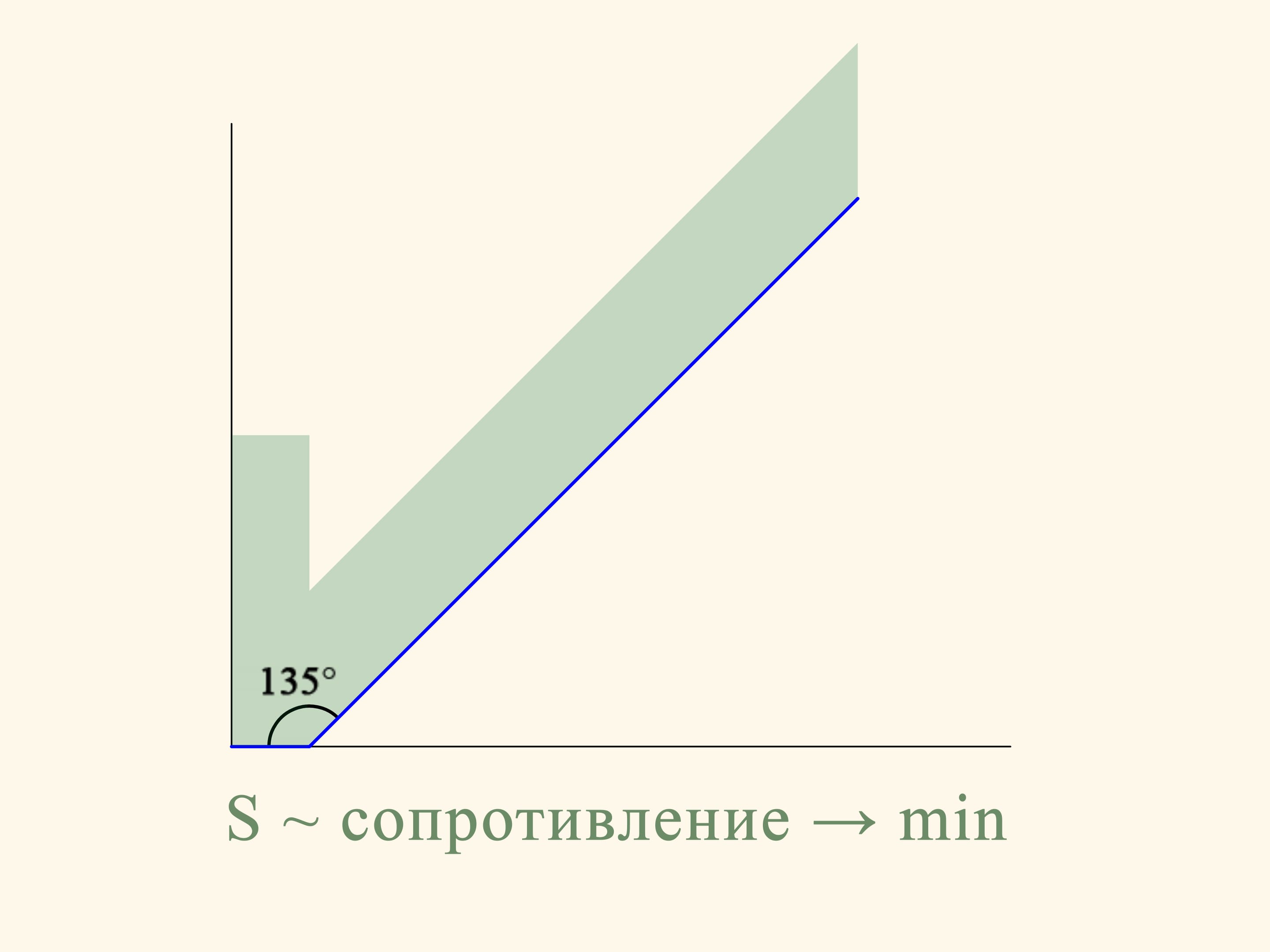
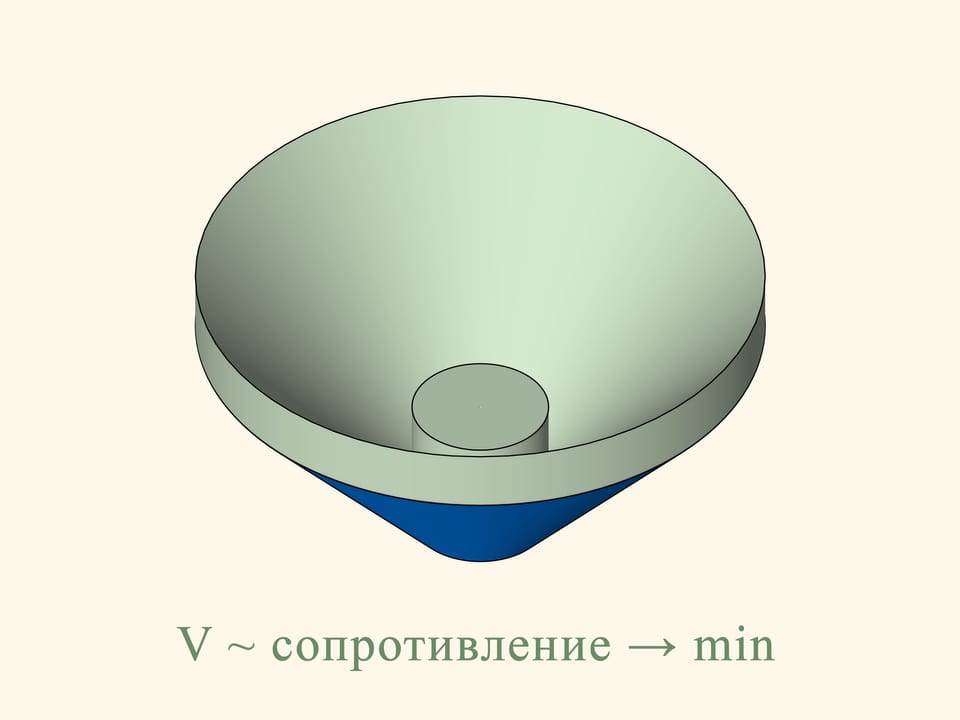
Dans le cas planaire la résistance de la section du cône tronqué est proportionnelle à la somme des aires d’un rectangle construit sur la base plus petite du trapèze et d’un parallélogramme, construit sur le côté oblique. Et cette résistance doit être minimisée. Si on fait le calcul, on constate que l’aire de la figure en vert est minime lorsque l’angle entre la base et le côté oblique est égale à 135°. Autrement dit, la sphère après la collision avec le côté oblique bougera en direction strictement horizontale.
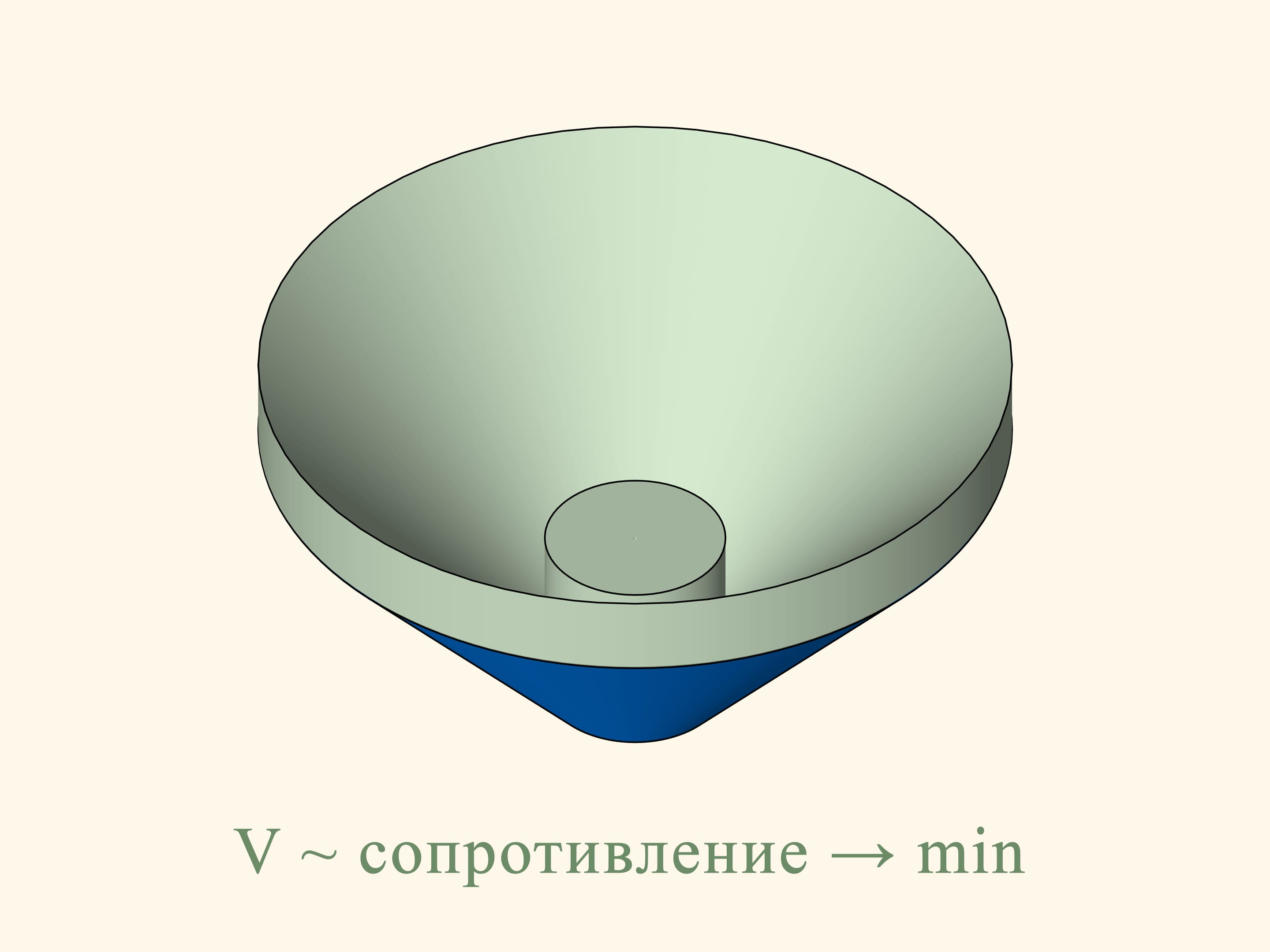
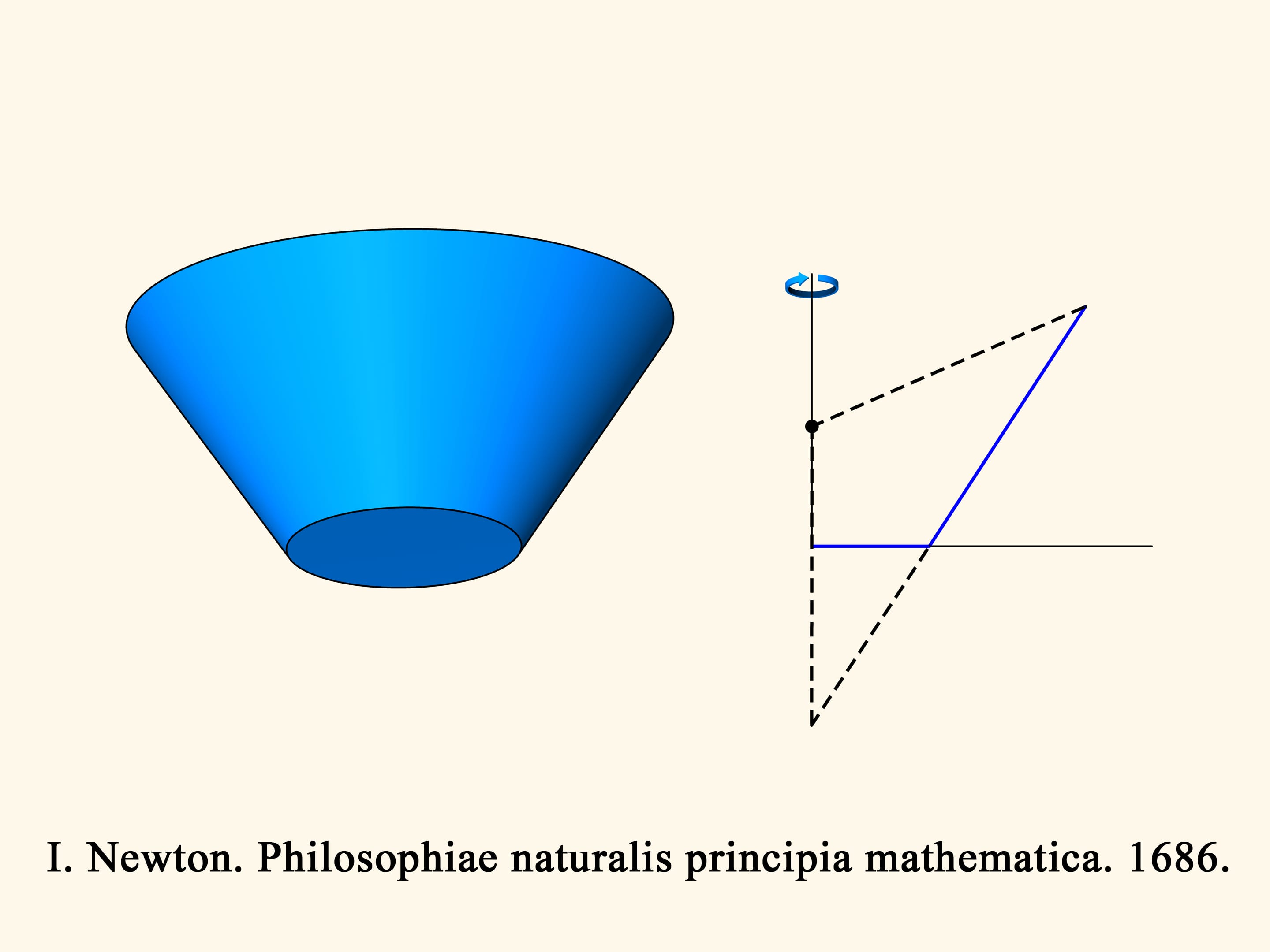
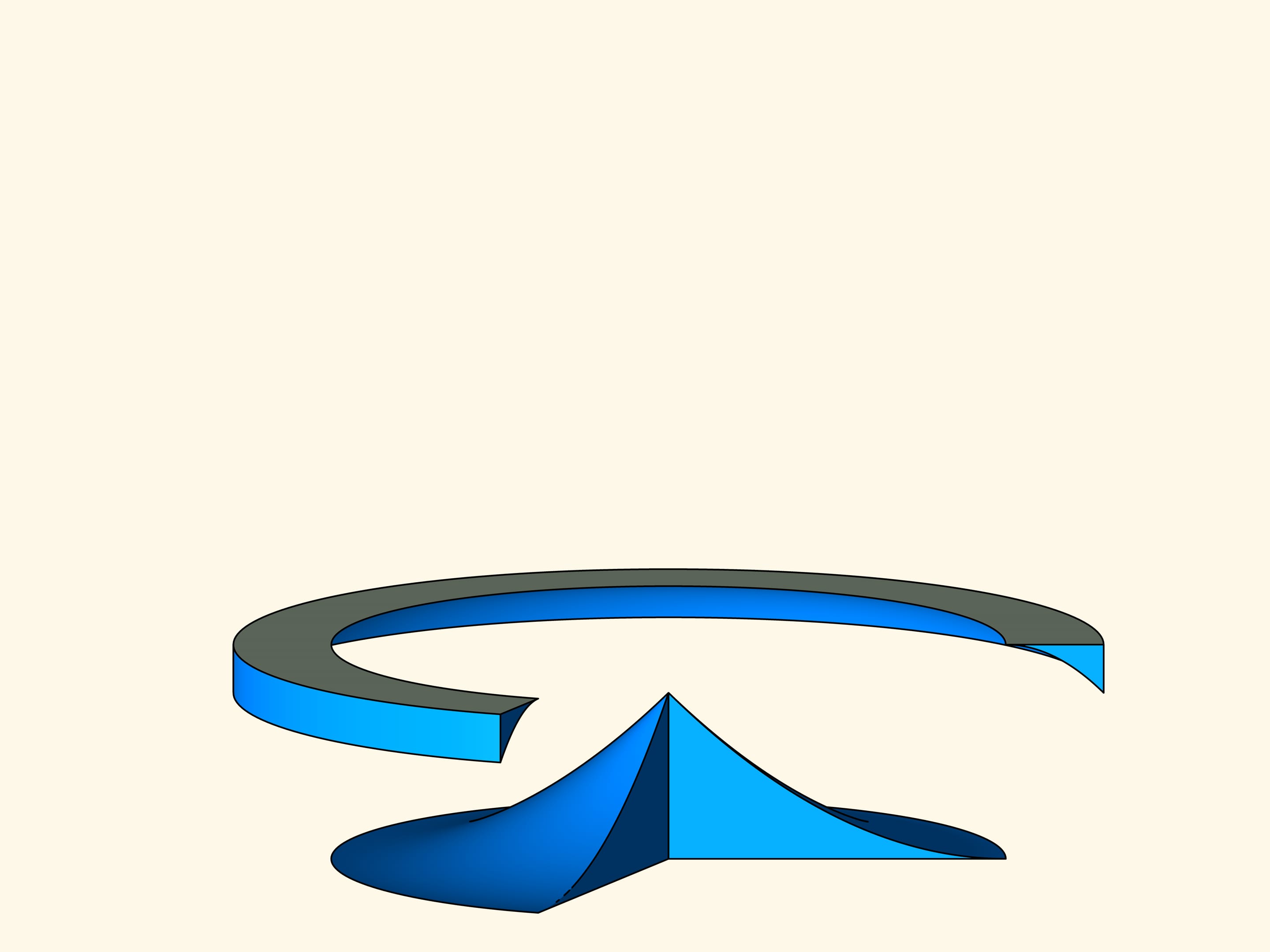
Est–ce qu’il suivra de la solution planaire du problème, que la section du cône tronqué optimale pour le problème en trois dimensions doit satisfaire la même condition? Il s’avère que non. Pour passer d’une section d’un objet à l’objet lui–même, il faut tourner la figure plane autour de l’axe vertical. Les petits segments verticaux plus éloigné de l’axe, formant l’aire, décriront une trajectoire beaucoup plus longue pendant la rotation et ils donneront donc une contribution plus grande au volume. Par conséquence, on ne peut pas trouver le volume minimum en utilisant la solution du problème dans le plan.
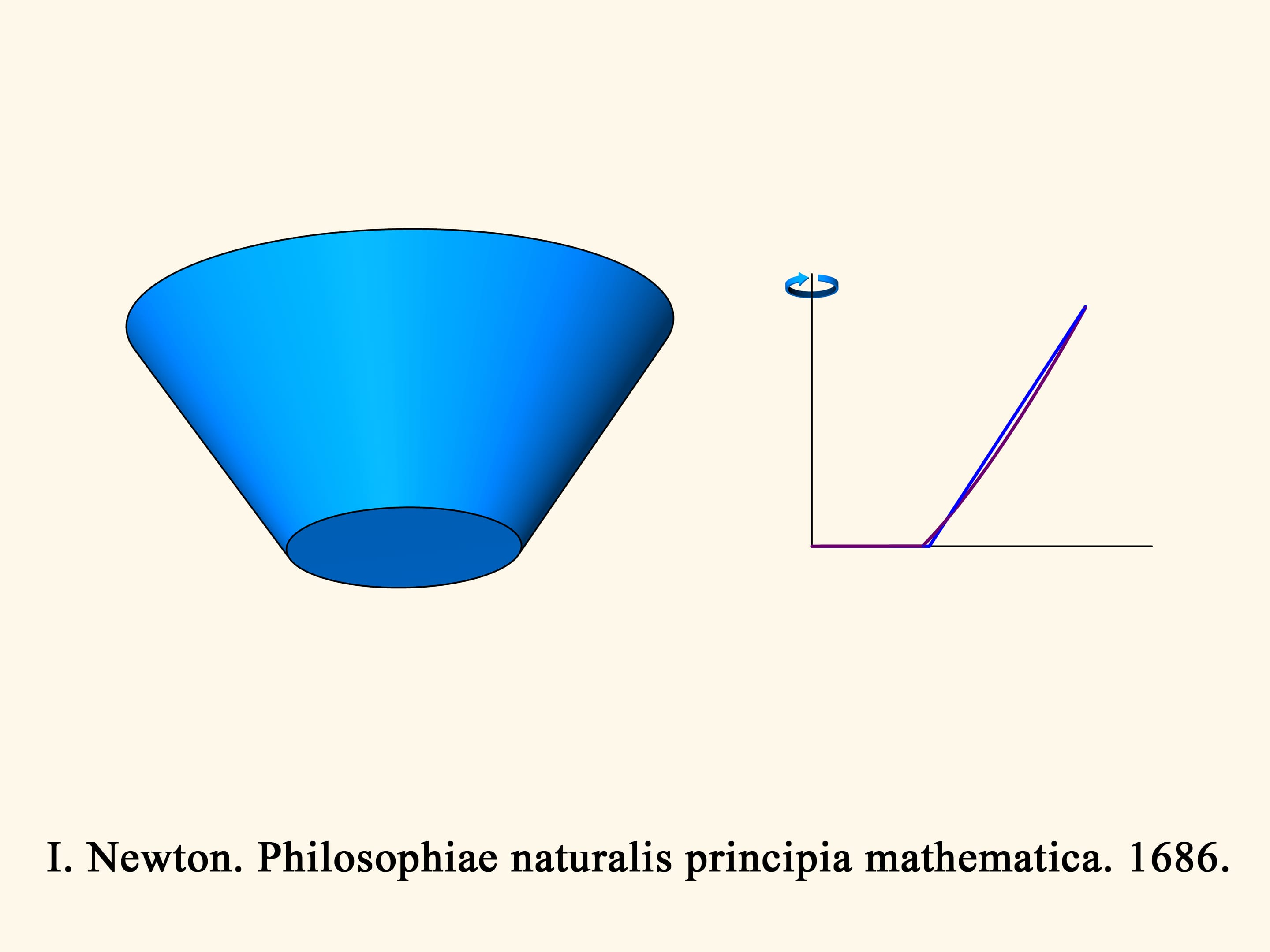
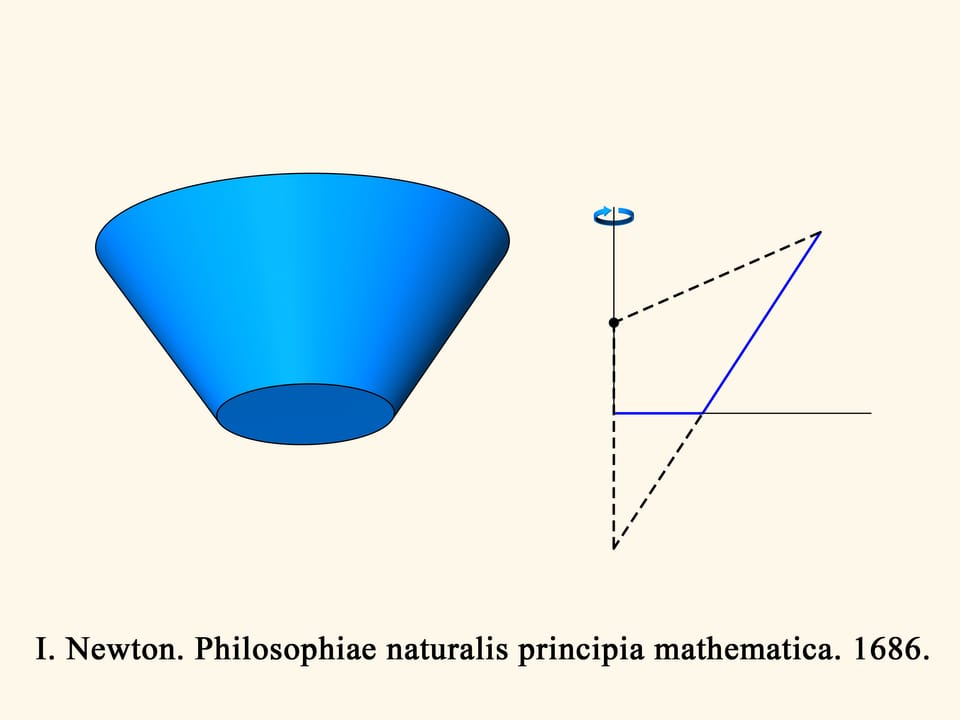
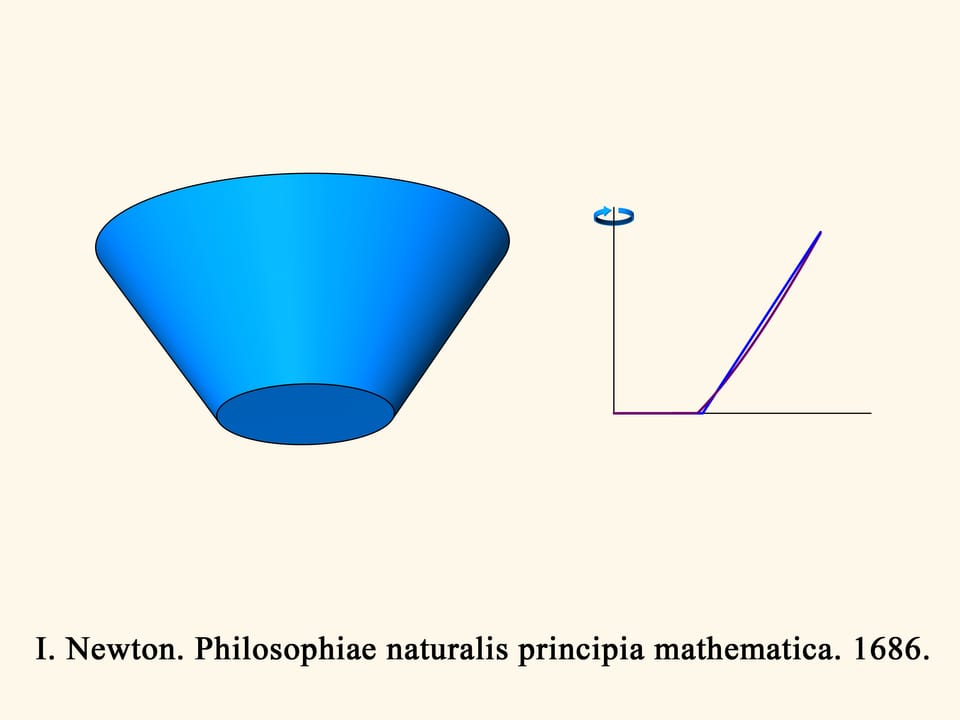
Dans le cas de trois dimensions, la résistance au cône tronqué en bleu est proportionnelle au volume du corps solide en vert, et il faut trouver le minimum de ce volume, parmi tous les cônes tronqués. Newton montre que le cône tronqué sera optimal — c’est–à–dire, il rencontra la moindre résistance — à la condition suivante. Prenons le point au milieu de la hauteur du trapèze et connectons le au point plus extrême de la base par un segment droit. Ajoutons un segment vertical de cette longueur en dessous du point au milieu de l’hauteur. La génératrice du cône optimal est donnée par la base du triangle isocèle ainsi obtenu. Il est surprenant que le solide qui rencontre le moins de résistance n’est pas un cône mais un cône tronqué!
Mais quel sera le solide de révolution convexe meilleur, dans le sens de la moindre résistance, avec une largeur et une hauteur données? Bien qu’à l’époque n’existait pas encore de calcul variationnel (ces problèmes maintenant sont résolus par cette méthode), Newton trouve la réponse à cette question. Il montre que le meilleure solide convexe de révolution ne diffère pas beaucoup du cône optimale, et calcule la courbe génératrice exacte de ce solide.
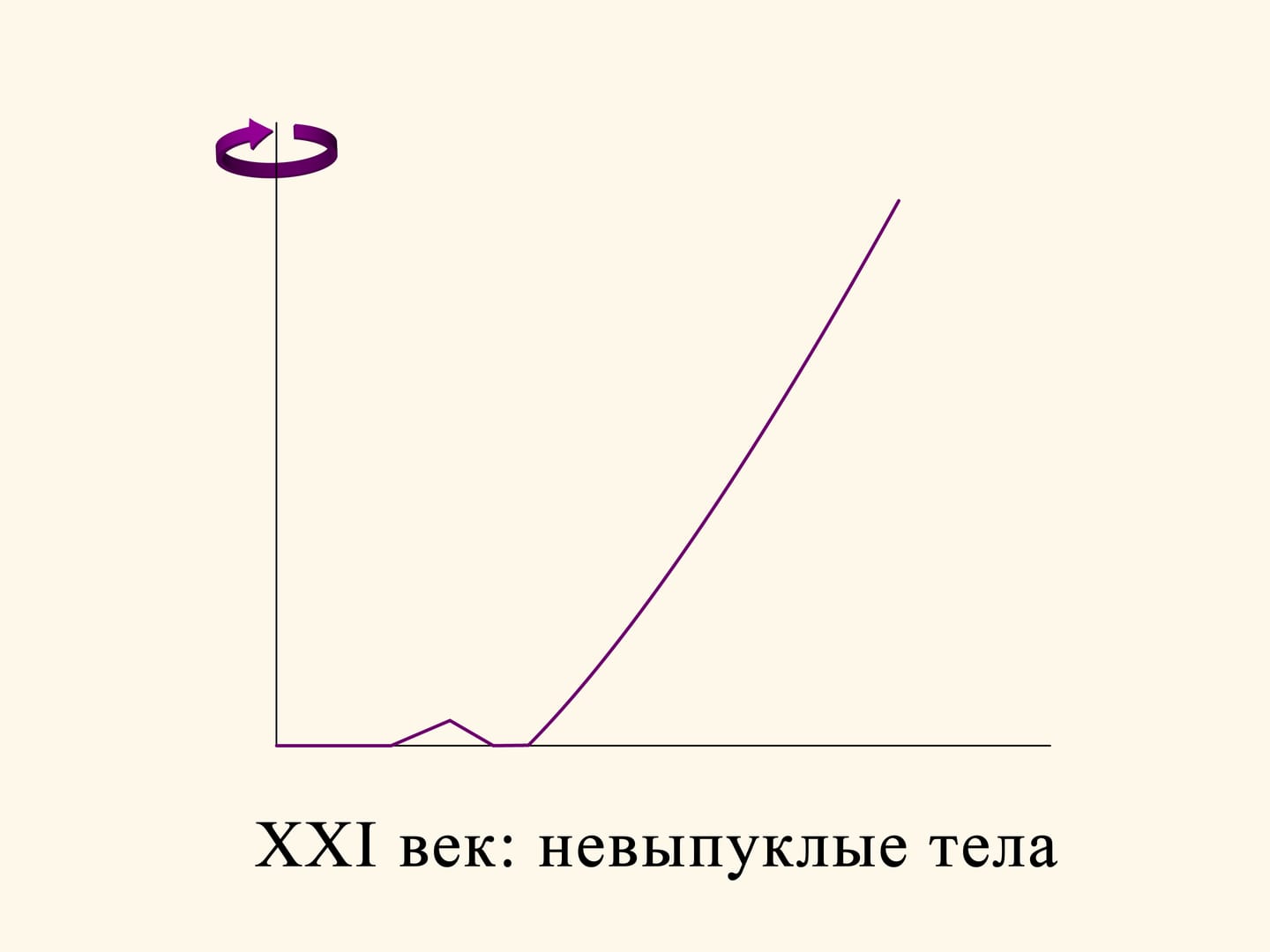
Depuis l’époque d’Isaac Newton, pour plus de 300 ans, les scientifiques ont étudié le problème aérodynamique dans un milieu raréfié dans la même formulation initiale: trouver un solide convexe de révolution. Il semblait naturel que le meilleur solide devait être convexe. Seulement dans le XXIe siècle les mathématiciens ont essayé de renoncer à la condition de convexité, et cela a conduit à un résultat incroyable!
Prenons, par exemple, la section du solide optimal trouvé par Newton, et au milieu la partie plate faisons un trou triangulaire. Le solide de révolution obtenu n’est plus convexe, mais sa résistance diminue par rapport à celle du solide convexe. En fait, si la rainure n’est pas trop profonde, une sphère, après l’avoir heurté rebondit en direction oblique et n’entre plus en collision avec le solide. La composante verticale du vecteur impulsion de la sphère, et, par conséquent, le freinage dû à la collision sera plus faible que pour un rebond sur une surface horizontale.
Nous allons observer deux constructions intéressantes de solides non convexes, exposées dans le travail de A. Yu. Plakhov.
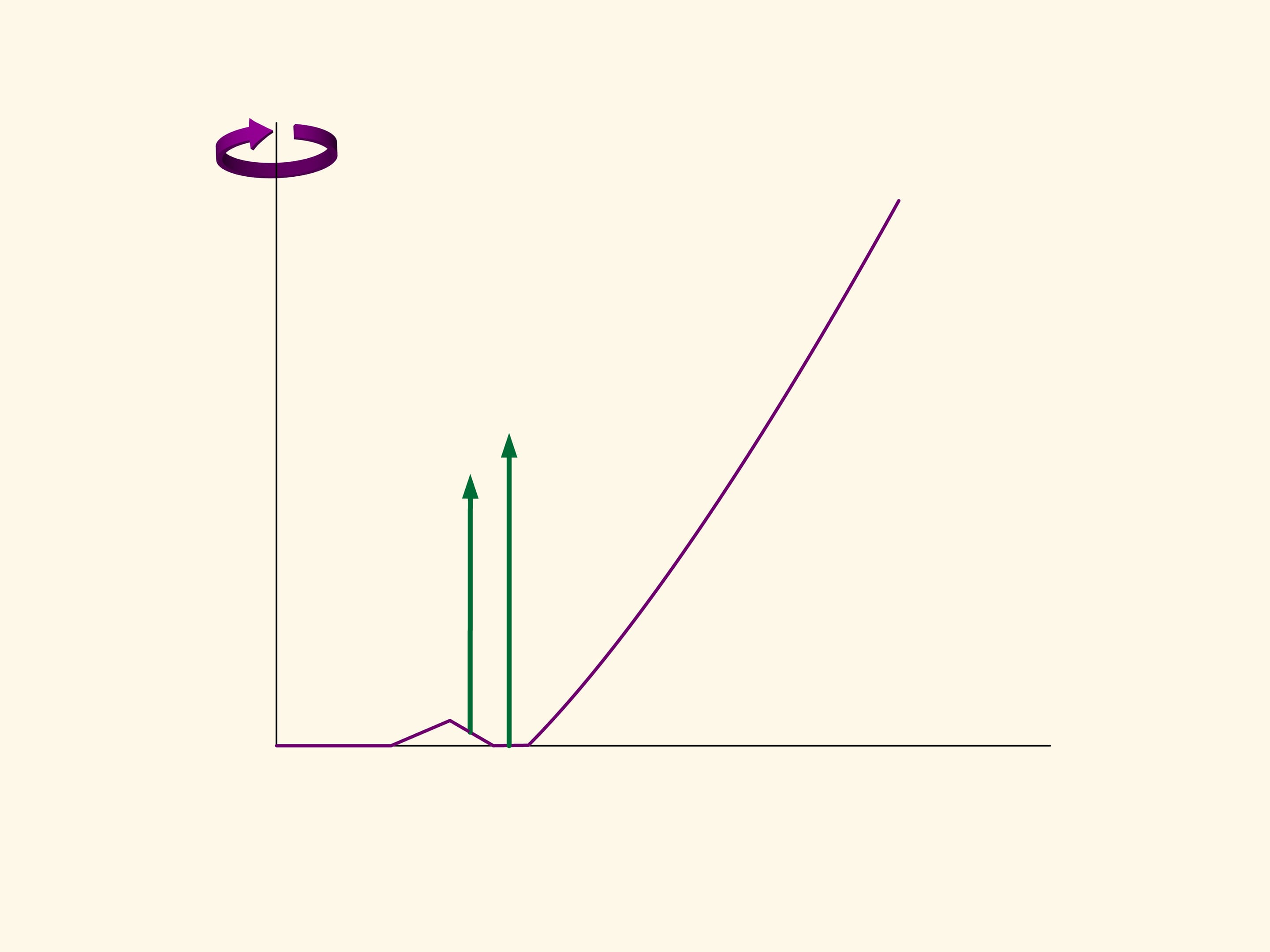
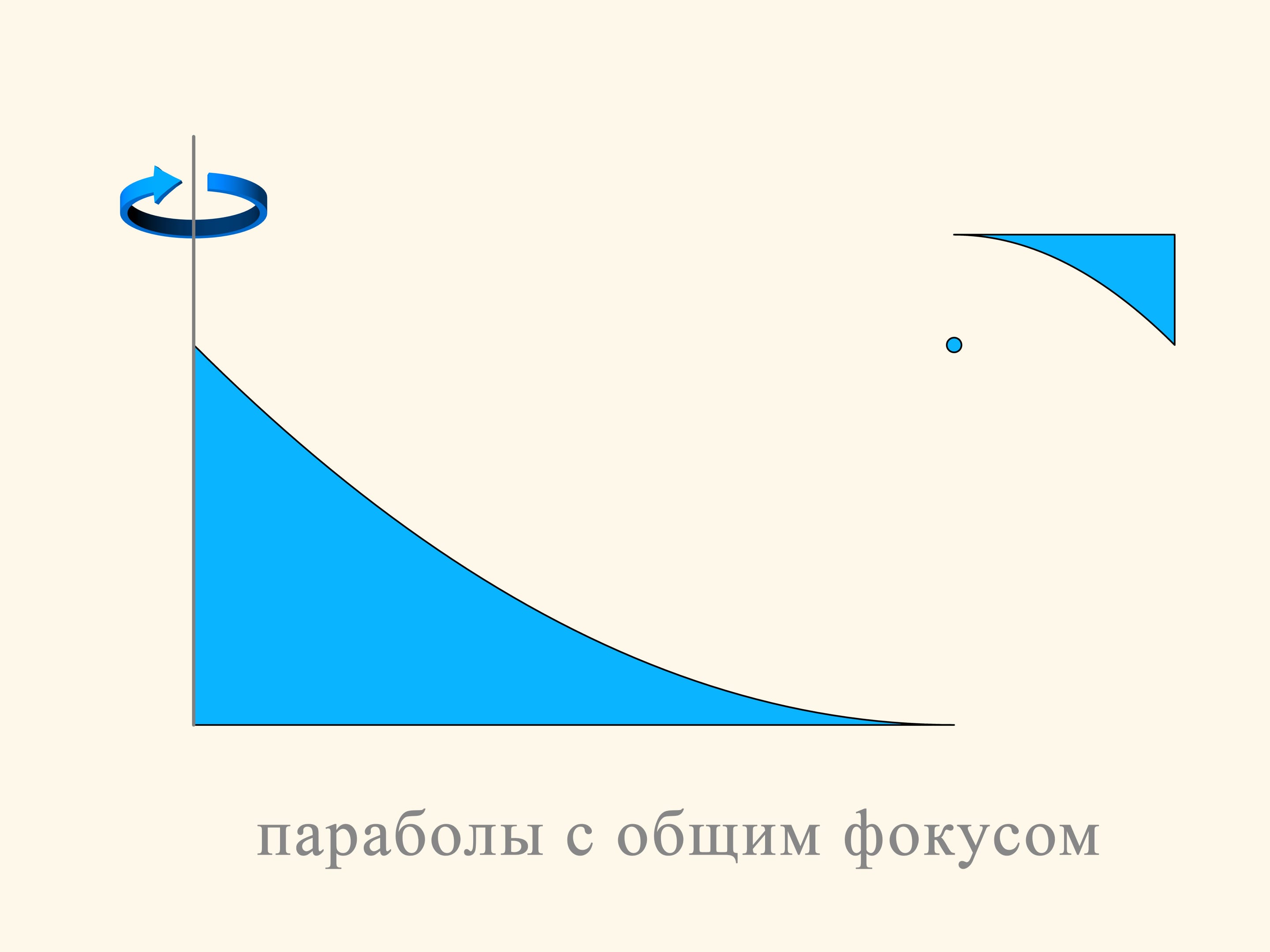
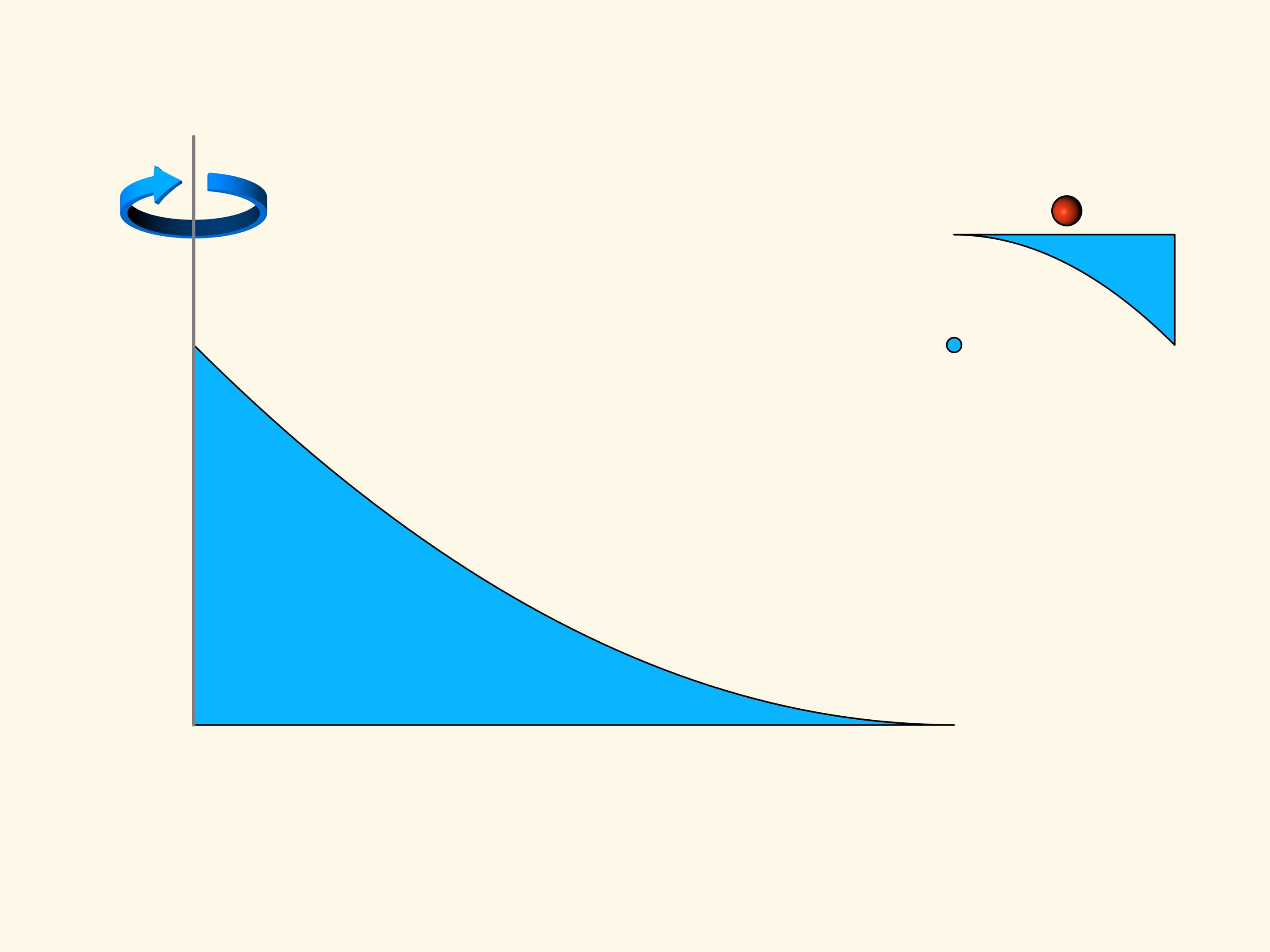
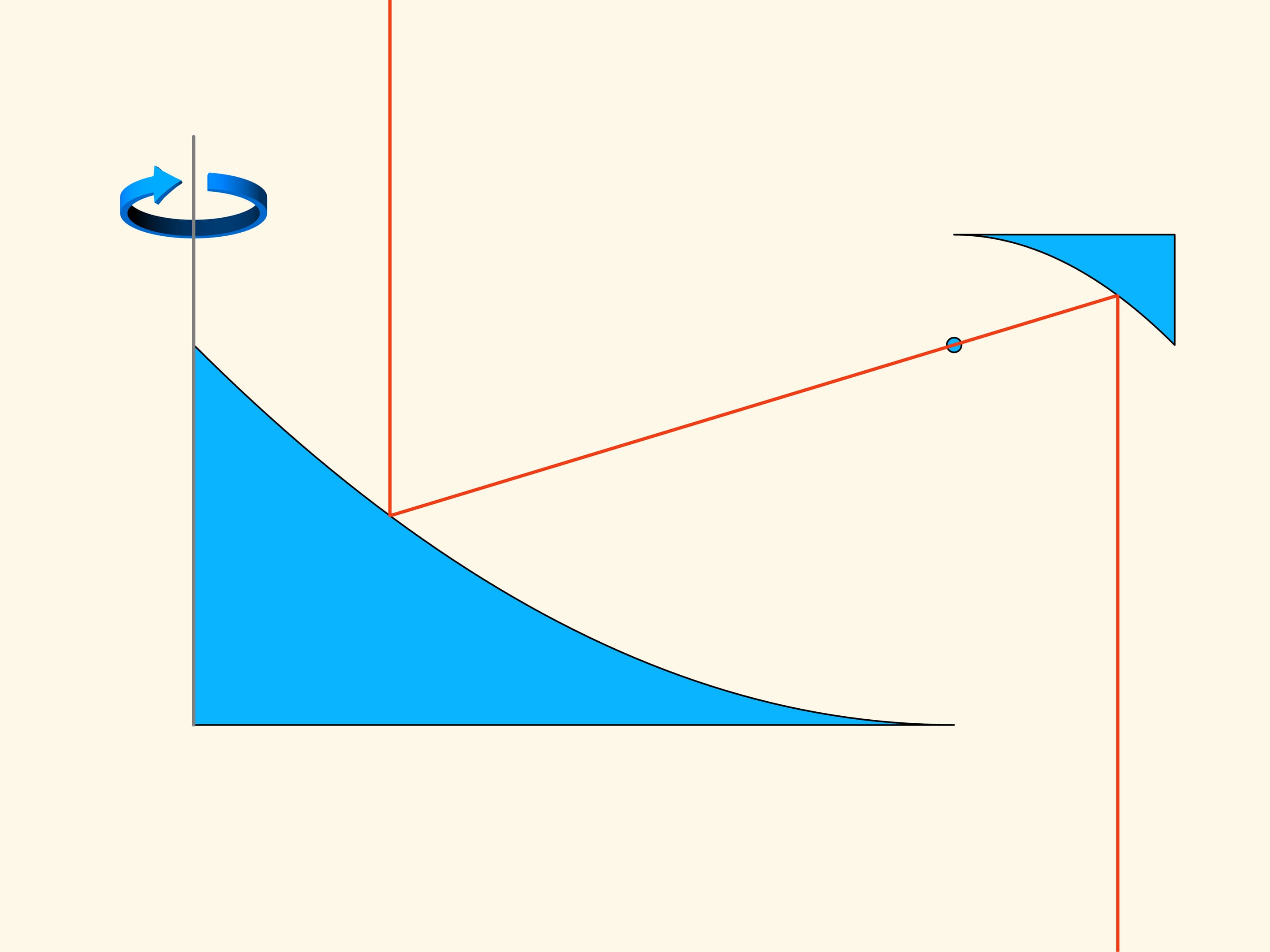
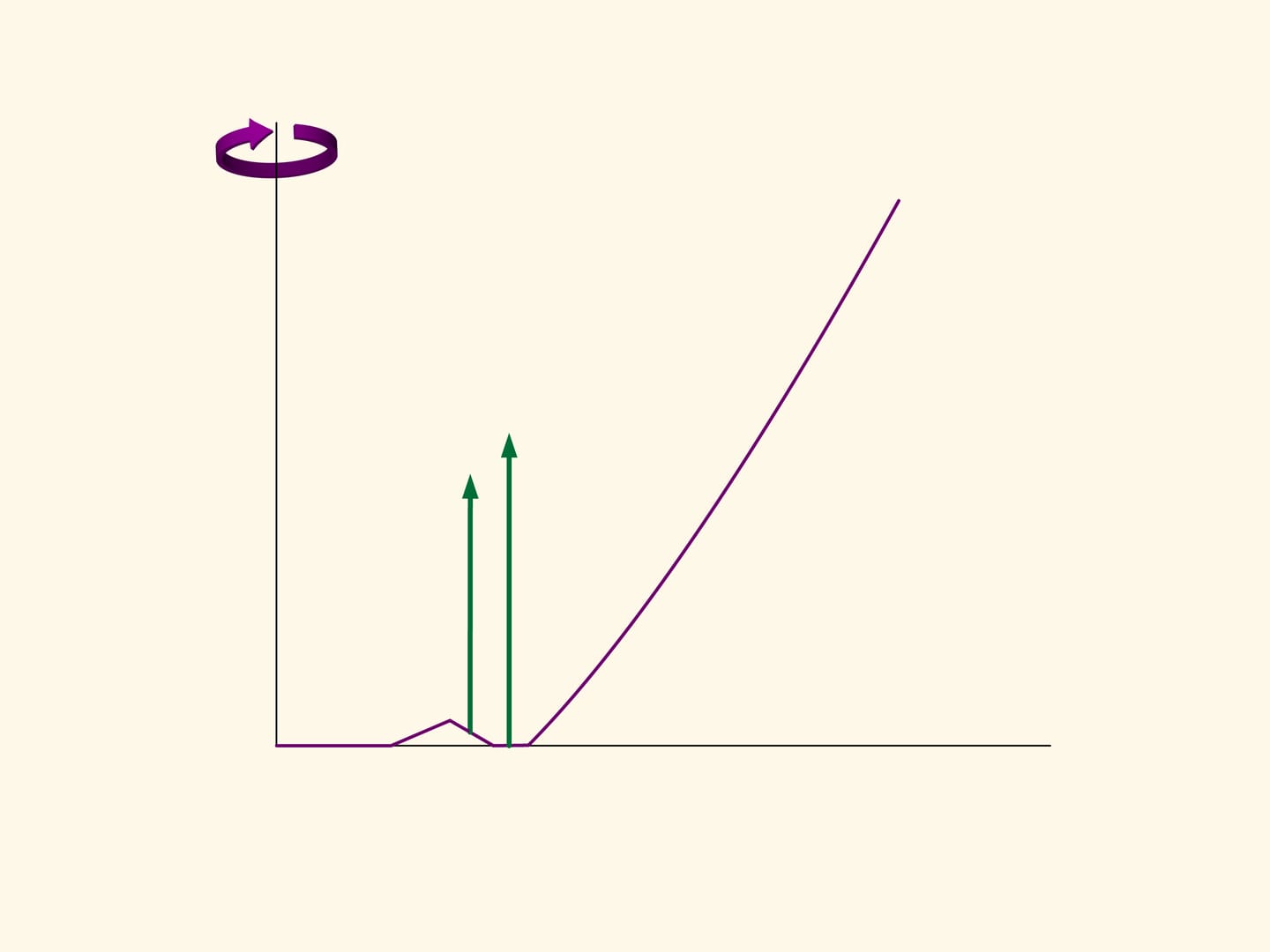
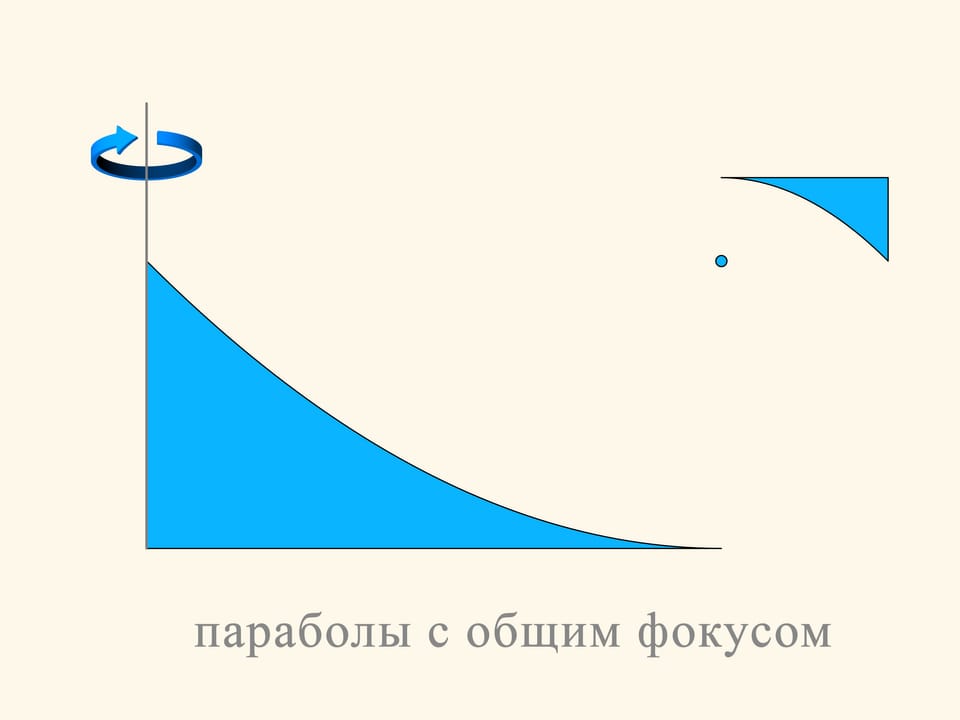
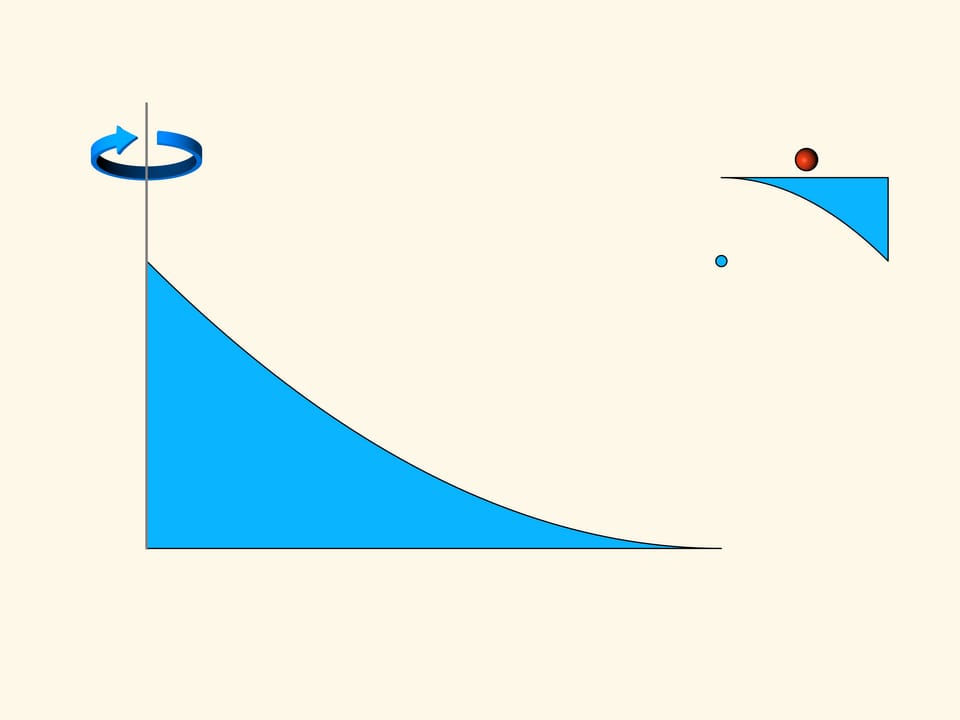
La section du premier solide se compose de deux morceaux de paraboles, placées dans le plan de façon que leurs foyers et leurs axes coïncident. Le mouvement sera dans la direction des axes des paraboles. Comme vous le savez, la parabole a la propriété optique que les rayons parallèles à son axe, après réflexion sur la parabole passant par son foyer. Dans la construction considérée, une partie des sphères qu’elle rencontre, tombe dans la petite partie horizontale tangente à la petite parabole et oppose une résistance au mouvement. Mais la plupart des sphères sont reflétées par la parabole plus grande, passent par le foyer, puis sont reflétées par la parabole plus petite, et s’en vont dans une direction parallèle à celle initiale. Dans le milieu raréfié de Newton ces sphères n’augmentent pas la résistance parce qu’elles ne perdent pas la composante verticale de l’impulsion, et après les collisions elles sortent dans une direction parallèle à celle avec laquelle elles étaient entrées, seulement déplacée en horizontale.

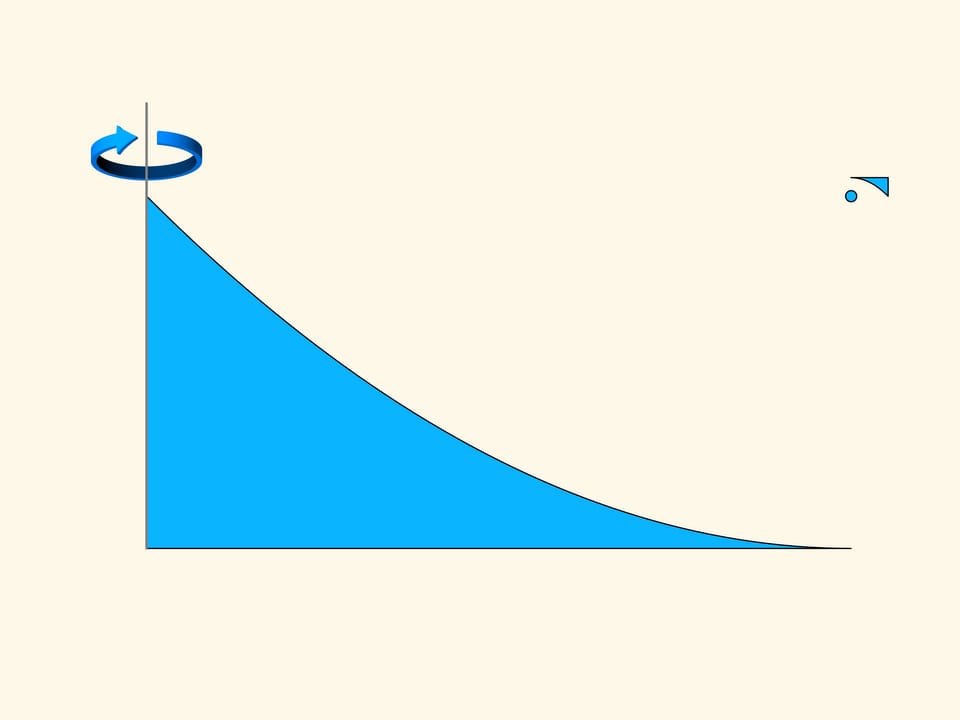
La partie du solide qui reflète les sphères peut être réduite, sans altérer l’idée de base de sa construction.
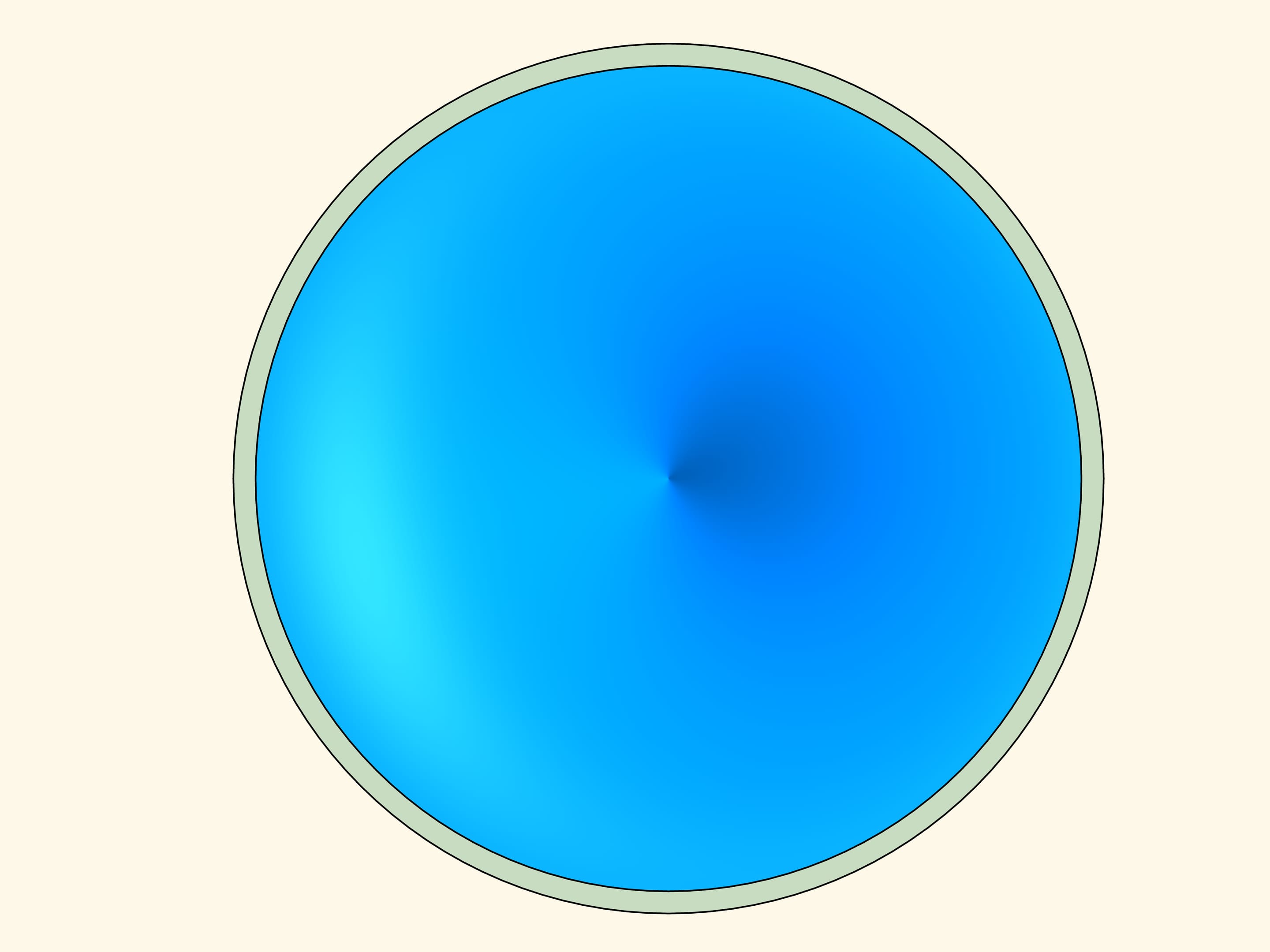
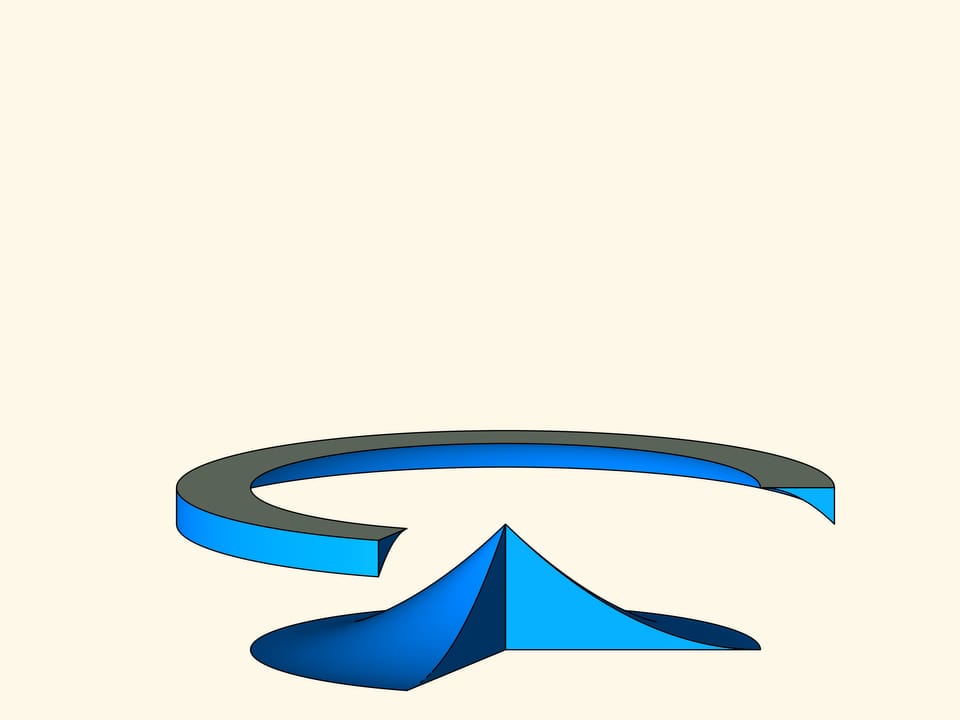
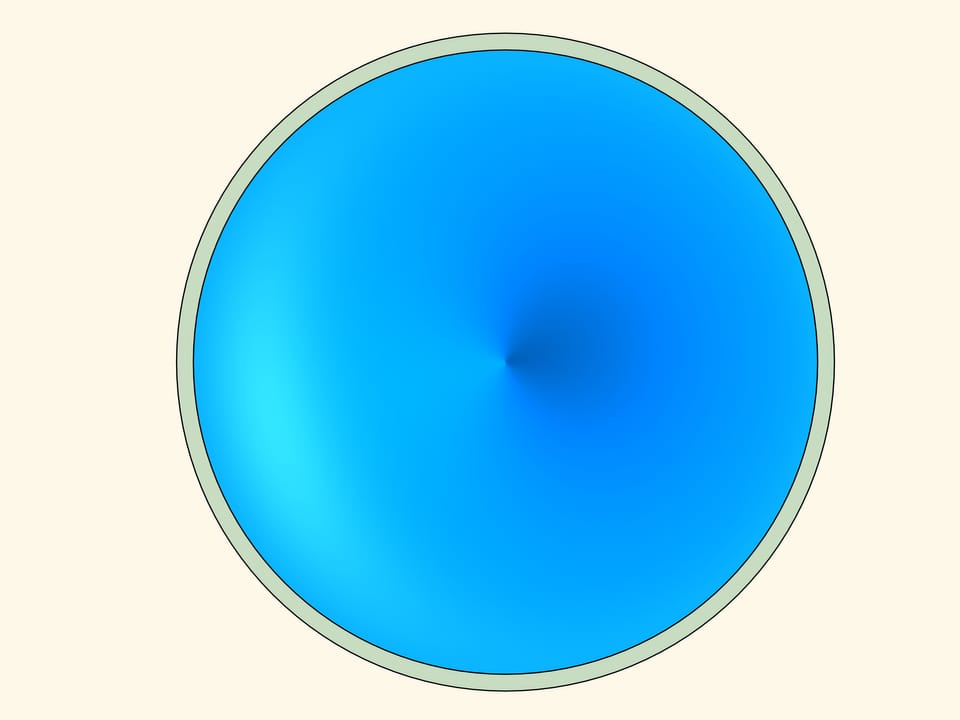
Nous faisons tourner la construction des deux paraboles autour de l’axe vertical. On obtient un solide qui nous rappelle une soucoupe volante. Si l’on regarde de dessus, on voit que la surface de ce disque est très grand. La surface qui oppose une résistance on peut la rendre autant petite que l’on veut. Pour un mouvement dans la direction de son axe de révolution ce solide dans un milieu raréfié de Newton rencontrera une résistance arbitrairement petite.
Mais y a–t–il des corps solides sans résistance du tous? Il arrive qu’il y a aussi ceux–là!
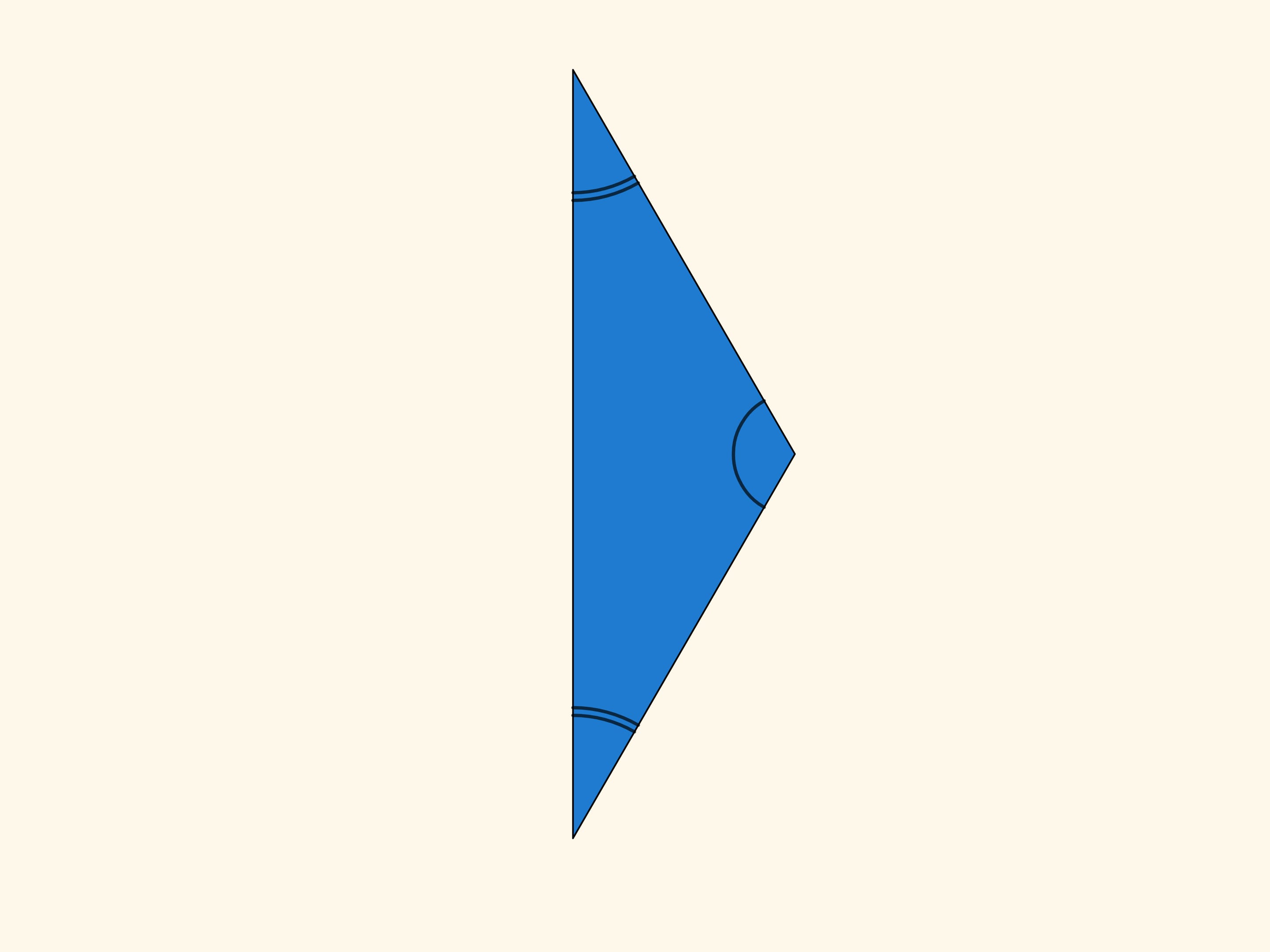
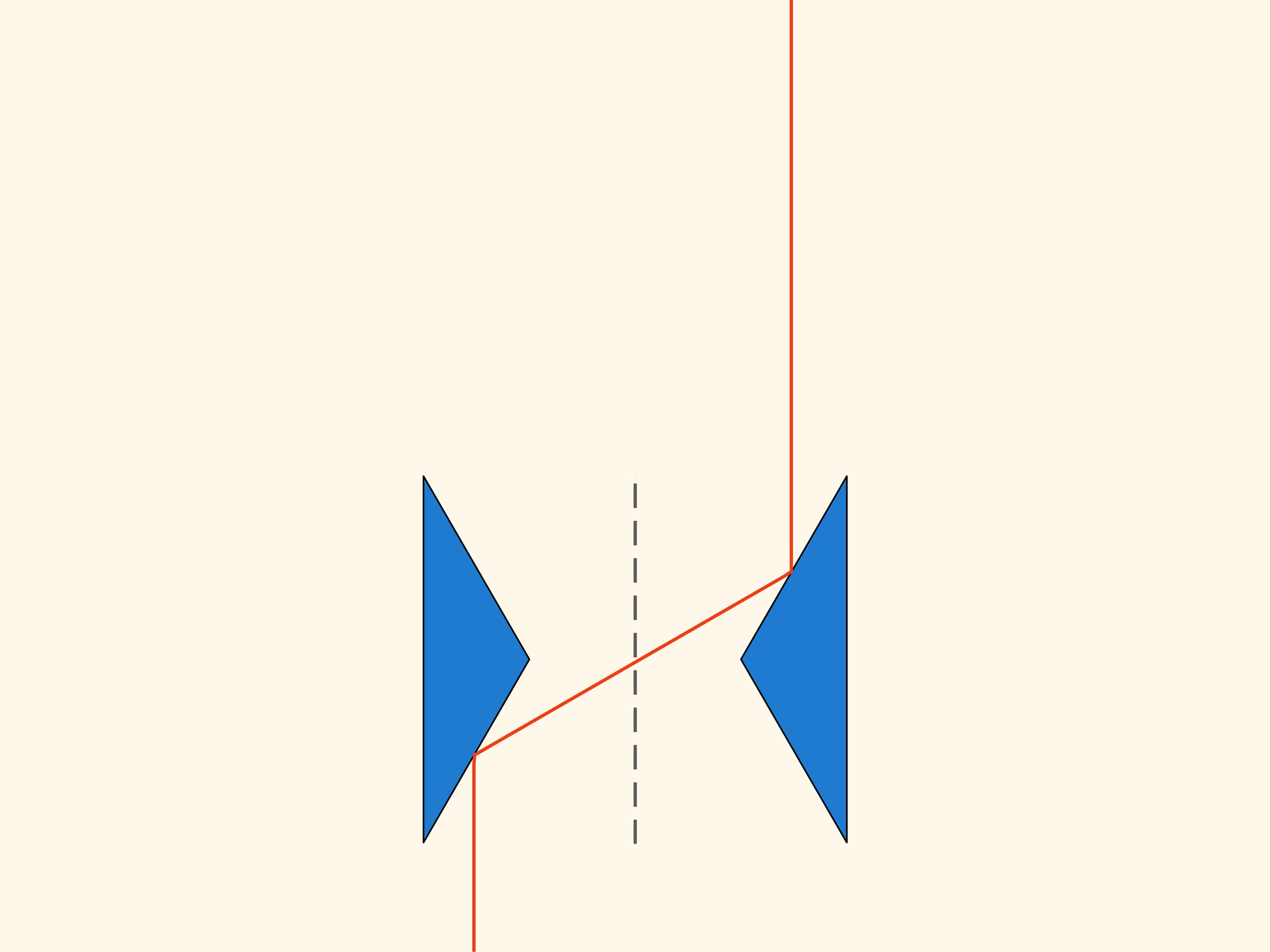
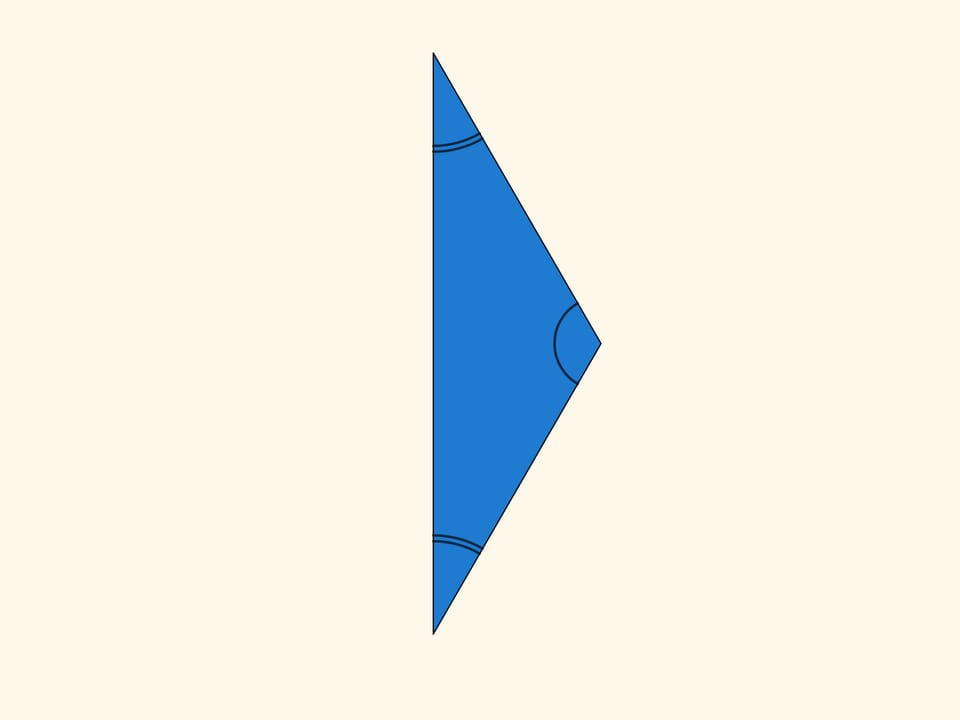
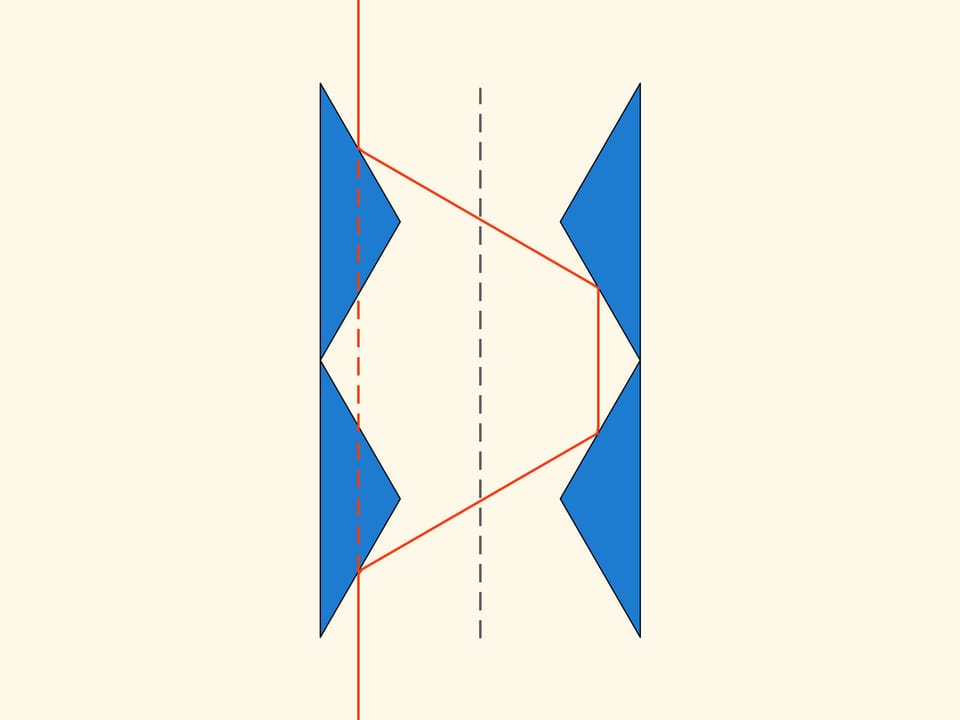
La construction est basée sur un triangle avec des angles de degrés 30, 30 et 120. Prenons un autre triangle symétrique par rapport à l’axe vertical et à une distance de deux hauteurs.
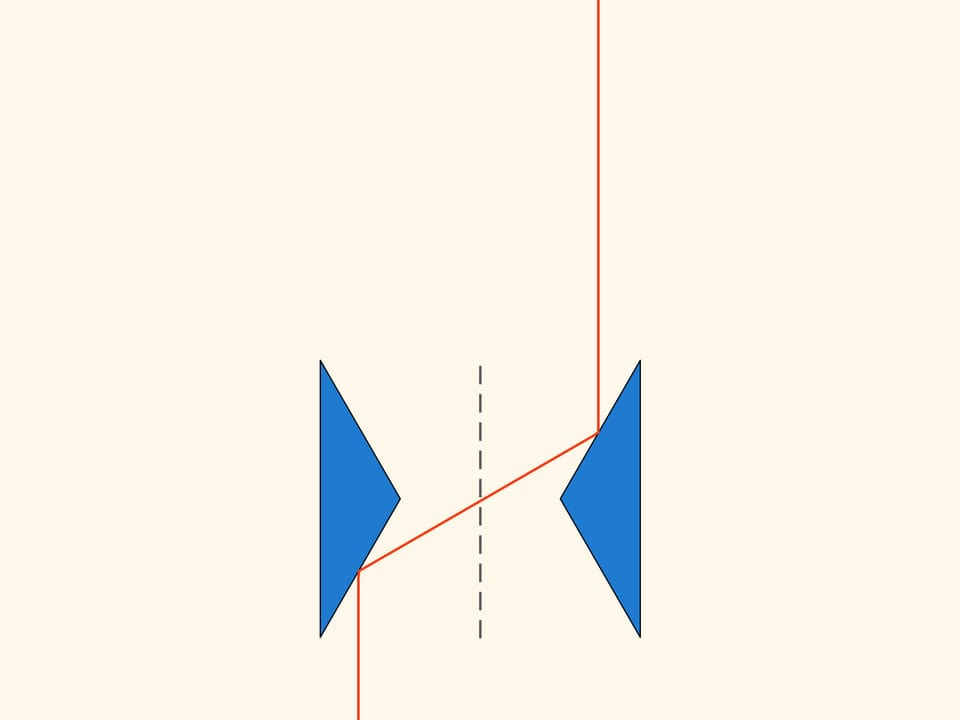
Observons ce qui arrive quand cette construction plane se déplace dans la direction de l’axe de symétrie dans un milieu raréfié de Newton. Certaines sphères ne l’heurtent pas du tout, et ces particules n’ont aucune influence sur le mouvement. Mais les sphères, avec lesquelles elle entre en collision, sont toujours reflétées par tous les deux triangles et sortent dans une direction parallèle à l’axe de symétrie, sans changer leur impulsion. De cette façon, la résistance du solide obtenu par rotation autour de l’axe de symétrie de cette construction, est égal à zéro!
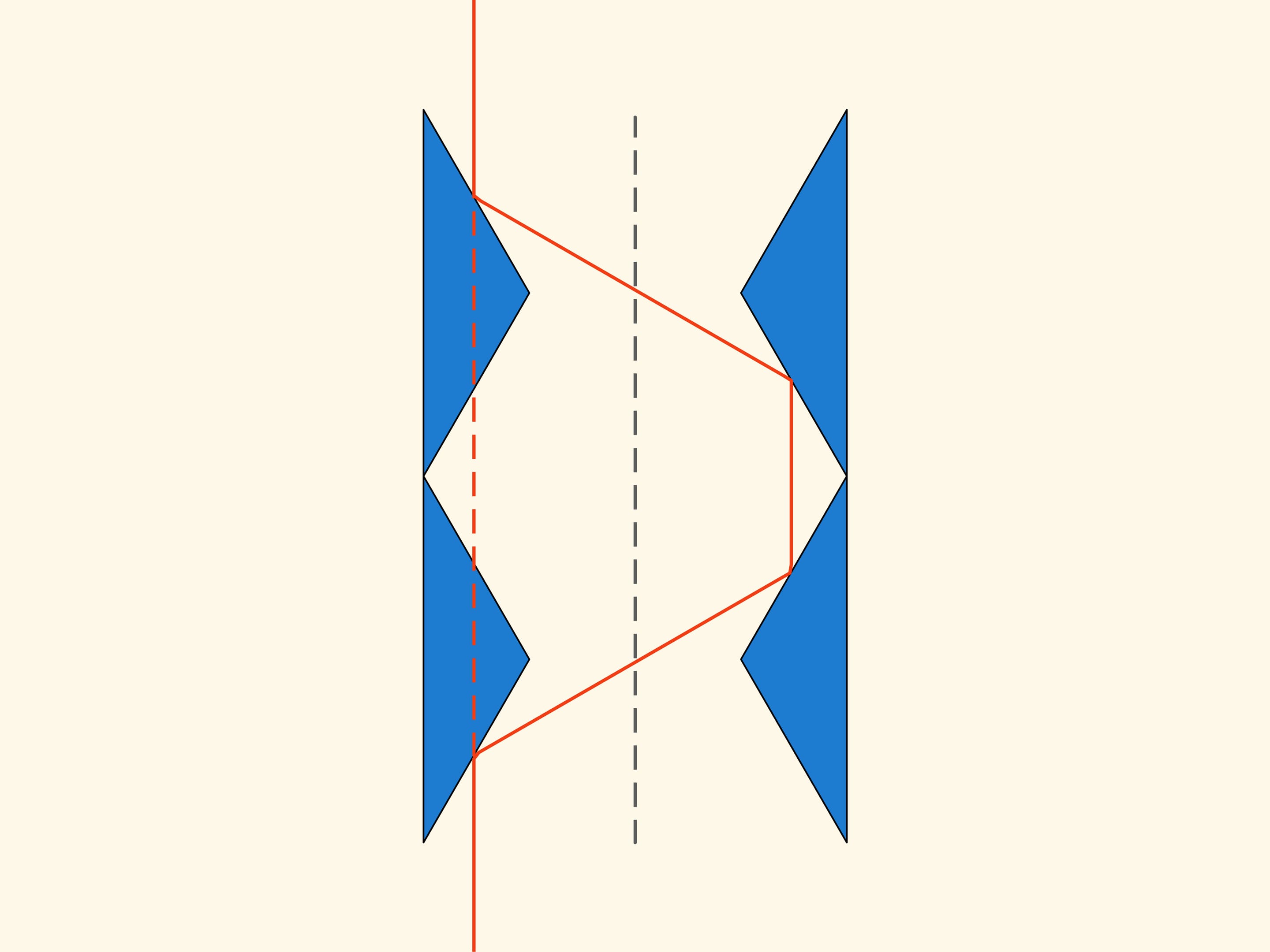
Pour suivre la trajectoire des sphères — les particules du milieu — nous avons représenté leurs trajectoires en forme de rayons. Mais c’est exactement le long de cette trajectoire qu’un rayon de lumière se propage! Si la dernière construction basée sur deux triangles est constitué de surfaces réfléchissantes, les parties droite et gauche des images que nous voyons à travers d’elle, résultent échangées. Mais si nous prenons une deuxième construction égale à la première et la plaçons au dessus de la première, alors les rayons qui passeront à travers du système optique ainsi obtenu ne résulteront ni déviés, ni inversé.
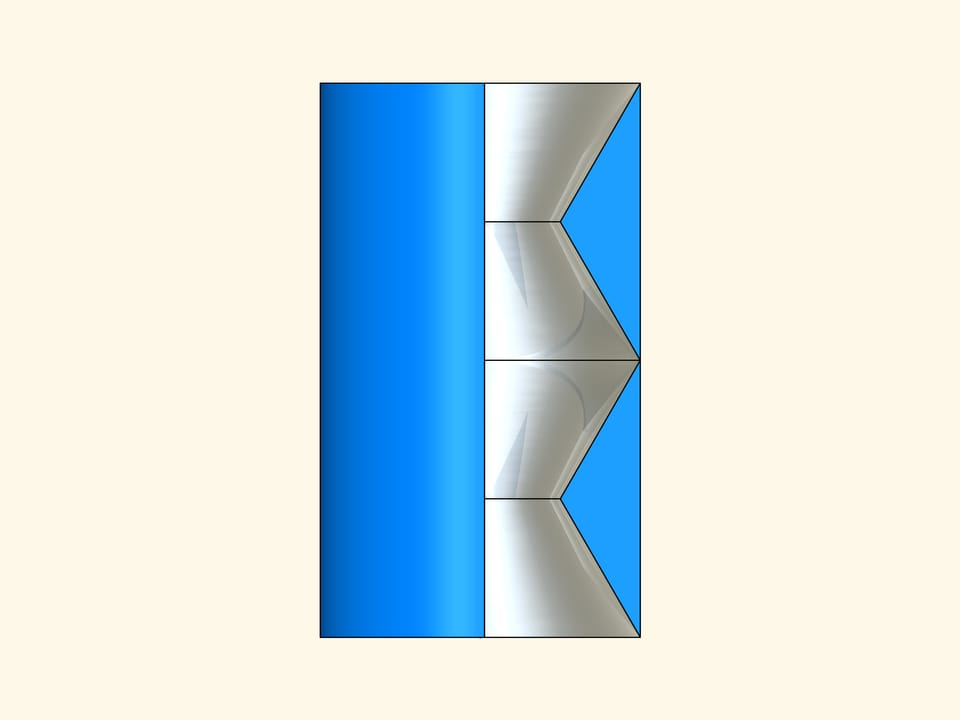
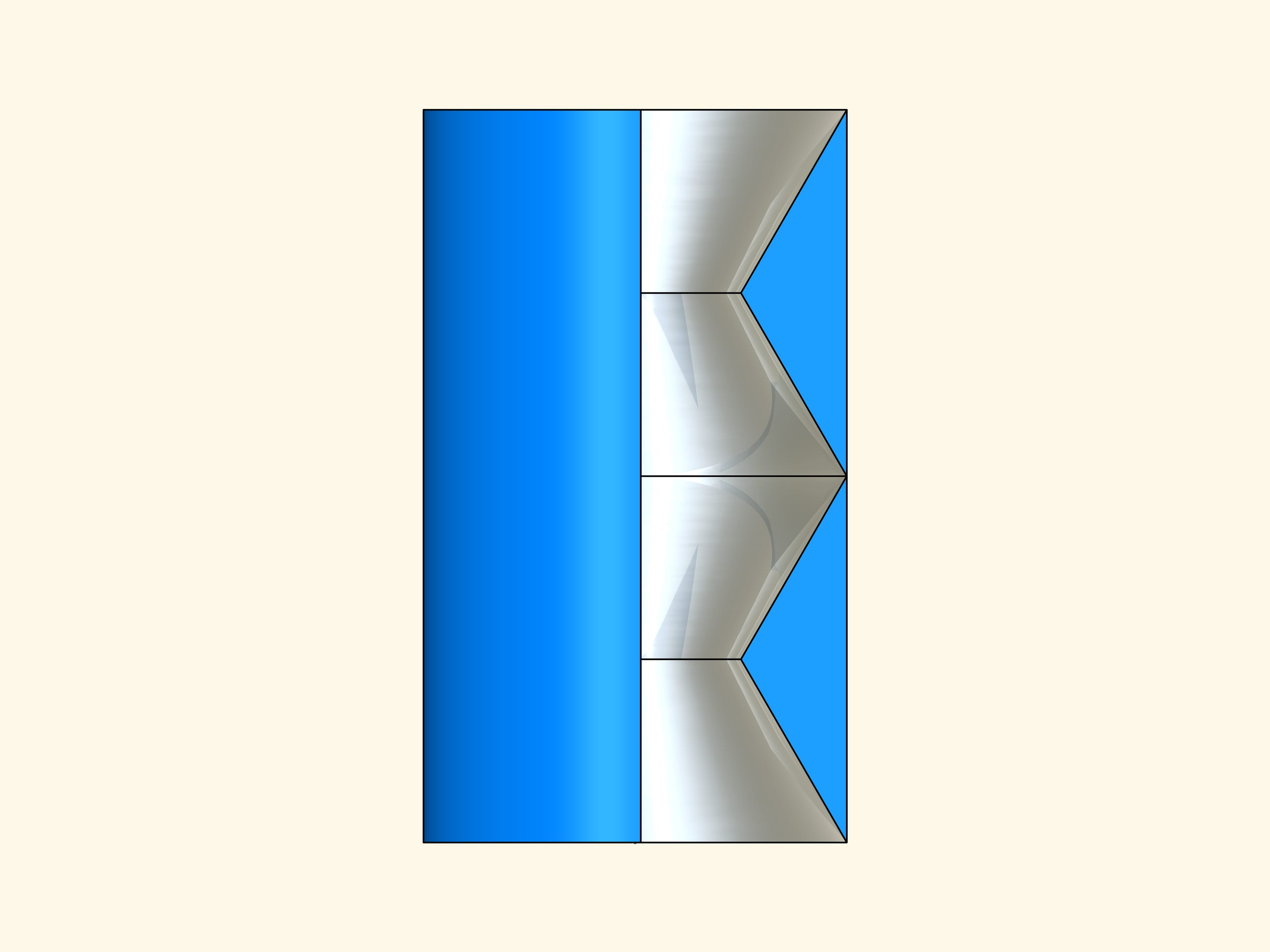
Faisons tourner notre construction planaire autour de son axe de symétrie et supposons que toutes les surfaces internes sont des surfaces–miroir. Nous obtenons un solide qui extérieurement est un cylindre mais à l’intérieur est constitué de quatre cônes tronqués aux surfaces réfléchissantes. Si nous regardons à travers ce cylindre en direction de son axe de symétrie, alors il sera invisible!
Dans son travail, A.Yu.Plakhov a aussi considéré comment faire un manteau invisible pour un corps arbitraire. Un objet recouvert d’un manteau semblable devient presque invisible!
Évidemment, ces constructions ne dévient pas (ou presque ne dévient pas dans le cas du manteau invisible) seulement les rayons qui sont parallèles à l’axe de symétrie. Et pour l’oeil humain le «cylindre invisible» en effet sera presque invisibles seulement si regardé d’assez loin. Il est possible que certains d’entre vous, en utilisant la connaissance des mathématiques, et, éventuellement, d’autres sciences, à l’avenir seront en mesure de construire des objets totalement invisible.